A quoi sert un thyristor ?
Le thyristor est un composant qui permet de commander des puissances relativement importantes avec peu de pertes car ils ne fonctionnent qu’en commutation. Est un composants de l’électronique de puissance, mais on le trouve aussi en électronique de faible puissance pour quelques applications spécifiques.
Domines d’applications
- Commande de moteurs (sens & vitesse)
- Interrupteur électronique haute puissance (relais statique, relais temporisé)
- Redresseur commandé
- Onduleur (convertisseur AC/AC)
- Commutation de phase
- Commande de phase
- Etc.
Définition
Les premiers thyristors commerciaux sont sortis en 1956. Leur capacité à commander une grande quantité de puissance et de tension associée à une grande compacité leur a permis de trouver de nombreux champs d’applications dans l’électronique de puissance : ils servent ainsi dans les convertisseurs statiques tels que les gradateurs, les redresseurs pilotés, les onduleurs, pour la commande des moteurs électriques
Schéma de principe
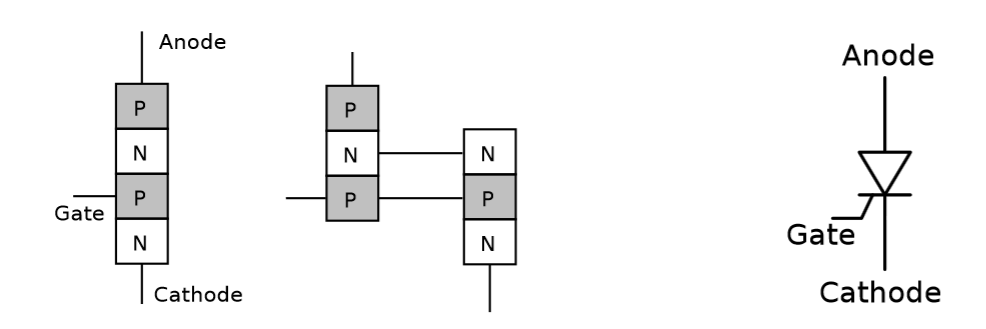
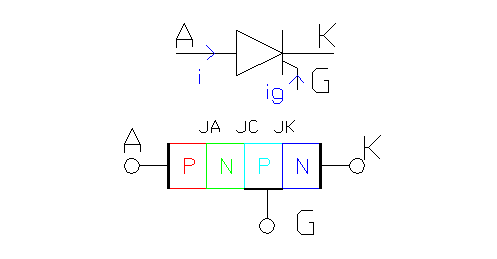
Le thyristor est formé d’un matériau semi-conducteur sur lequel on a créé trois jonctions : il y a ainsi deux zones N et deux zones P. Trois bornes sont accessibles : l’anode (A), la cathode (K) et la gâchette (G).
Principe de fonctionnement
Le thyristor se comporte comme une diode dont on commande la mise en conduction. Le symbole du thyristor ressemble d’ailleurs beaucoup à celui d’une diode. On y retrouve l’anode (A) et la cathode (K), mais une troisième borne apparaît : la gâchette (G). C’est elle qui permet la commande du composant. Pour que le thyristor devienne passant, il faut non seulement le polariser en direct comme une diode, mais aussi lui appliquer un courant adéquat entrant dans la gâchette. Une fois le thyristor amorcé, il est inutile de maintenir la présence du courant de gâchette. C’est la raison pour laquelle, la plupart du temps, la commande se fait par une impulsion de courant. Cette dernière doit néanmoins respecter certaines conditions : minimum de hauteur, minimum de durée. Le blocage se fait comme celui d’une diode, il n’est pas commandé par la gâchette.
Description
Le thyristor n’est rien d’autre qu’une diode commandé. Elle constituée d’un monocristal de silicium comprenant quatre couches alternativement de types P et N. Trois électrodes métalliques réalisent les liaisons vers l’extérieur. Il s’agit de l’anode « A », en contact avec une couche P, de la cathode « K », en contact avec une couche N et de la gâchette « G », en contact avec une couche P.
Ayant quatre couches, nous pouvons déduire qu’il y a trois jonctions. Une jonction d’anode, JA, une jonction de cathode JK et une jonction de commande ou centrale JC. Je peux encore dire que JA et JK sera passant de A vers K et que JC sera passant de K vers A.
Les différentes couches formant le thyristor ont leur particularité :
- couche N (entre JA et JC) est épaisse et peu dopée
- couche P (gâchette) est très mince
- couche N (côté cathode) est très dopée
En regard au dessin ci-dessus, les couches portent les noms suivant de gauche à droite
- couche d’anode (type P)
- couche de blocage (type N)
- couche de commande (type P)
- couche de cathode (type N)
Fonctionnement
Sous une tension positive
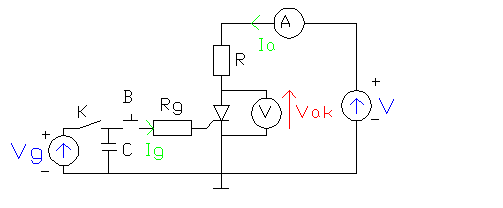
Réalisons notre étude à l’aide du schéma de câblage suivant :
1° Thyristor bloqué
Lorsque VAK > 0, les jonctions JA et JK sont polarisées dans le sens direct et ne supportent que des tensions faibles du essentiellement au caractéristiques du monocristal : Je peux donc dire que la tension VAK est pratiquement appliquée à la jonction JC polarisée en inverse. Le courant IA est donc le courant inverse de cette jonction, il est très faible. Je peux donc conclure que le thyristor est bloqué.
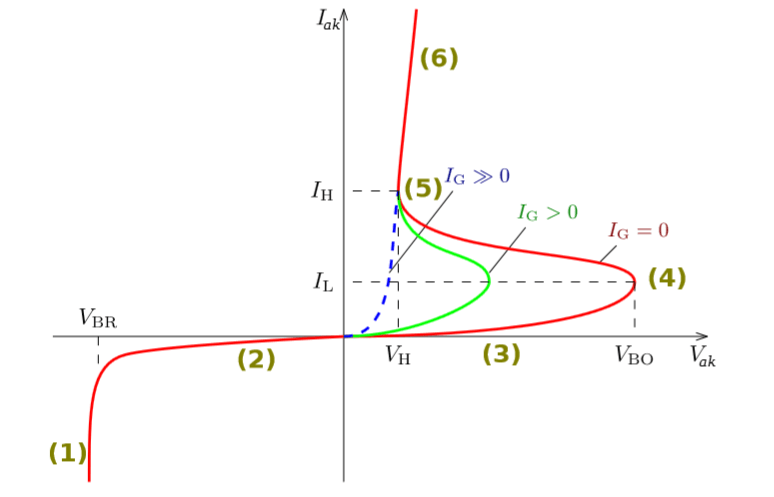
2° Amorçage sans courant de gâchette
Augmentons progressivement la valeur de V. Je peux dire que les jonctions JA et JK ne vont toujours supporter que de faibles tensions et que dès lors la tension appliquée en sens inverse sur la jonction JC croît, si bien que le champ électrique correspondant augmente. Nous pouvons donc comprendre que si nous continuons à augmenter la valeur de V, nous finirons par nous retrouver dans une situation ou le champ électrique sera tel que sous l’action de ce dernier, les minoritaires qui traversent la jonction JC seront capables de faire entrer cette jonction en régime d’avalanche. A ce moment, le potentiel VAK devient très faible. Comme on le voit, le courant Ia n’est limité que par la résistance R. En réalisant une analogie avec le transistor en régime de saturation, ce courant constitue à la fois le courant de collecteur et le courant de base.
Noter que dans ce type de fonctionnement, la conduction du thyristor est très mal contrôlée. Les pertes sont importantes au sein du thyristor et pourraient entraîner la destruction de ce dernier.
3° Amorçage par courant de gâchette
A l’aide de l’interrupteur K, réalisons la charge du condensateur. Une fois ce dernier chargé, ouvrons K et à l’aide de B appliquons le potentiel de charge du condensateur entre la gâchette et la cathode du thyristor. Il est claire que nous aurons appliqué un potentiel V positif entre l’anode et la cathode afin de polarisé les jonction JA et JK . Nous allons donc avoir circulation d’un courant Ig dans le sens direct de la jonction JK. Si ce courant est suffisant, le thyristor s’amorce.
En raison du dopage important de la couche N de cathode, le courant Ig se caractérise par un flux d’électron allant de K vers G. Comme la distance entre la jonction JK et JC est très faible, de nombreux électrons atteigne cette jonction JC. Or sous l’action du champ électrique du à la polarisation inverse de cette jonction face à V, les électrons deviennent très énergétiques et dès que leur nombre est suffisant une avalanche locale s’établit en un point particulier de la jonction JC. Le courant Ia de grande densité s’engouffre dans cette région et si le courant reste supérieur à une valeur dite d’accrochage, les porteurs seront suffisamment nombreux pour que l’avalanche s’étende de proche en proche sur toute le jonction.
Je peux encore dire que le courant Ia va continuer à croître durant toute la durée d’avalanche de la jonction et une fois cette dernière terminée, le courant . Il va sans dire que cette situation persistera même après la disparition du courant de gâchette et que seul une inversion de polarité de V ou la disparition de V ou une diminution de V tel que le courant Ia devienne trop faible que pour maintenir l’accrochage pourra éteindre le thyristor.
4° Thyristor en régime de conduction
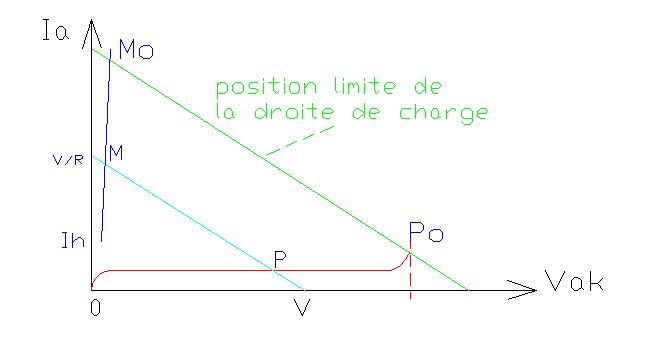
Après l’amorçage, l’équation devient : . Si nous faisons varier la tension V, la droite de charge subit une translation horizontale. Le point M décrit la caractéristique quasi verticale du thyristor. Po est le point d’amorçage correspondant une tension V suffisante que pour amorcer le thyristor sans courant de gâchette. La tension correspondante sur l’axe des abscisses est la tension inverse limite au droit de la jonction JC. Lors de l’amorçage, le point passe de la position Po vers la position Mo. La tension inverse diminue puisque la jonction conduit et le courant croît puisque les porteurs traversent la jonction.
Le point M est le point de fonctionnement du thyristor en conduction, on remarque également que si nous augmentons le potentiel V, la courbe va se translater et l’ensemble des points de fonctionnement M formera la droite de fonctionnement du thyristor. Noter encore que le thyristor avant l’impulsion de gâchette se trouve au point P et que dès l’avalanche, ce point se déplace vers M.
Sous une tension négative
Lorsque le thyristor conduit et que l’on réduit la tension V (soit volontairement soit parce que V est une tension alternative), le point M se déplace vers le bas de la caractéristique et le courant Ia diminue. Lorsque ce dernier devient inférieur à Ih appelé courant de maintien le thyristor se bloque. Les porteurs mobiles qui avaient envahi les quatre couches de cristal disparaissent par recombinaison et aussi parce qu’ils sont déplacés par une tension VAK négative.
Les jonctions JA et JK deviennent très vite bloquantes et capables de supporter une tension inverse. La jonction JC cesse d’être en régime d’avalanche un peu plus tard, l’évacuation des porteurs y étant plus lente. Le blocage d’un thyristor n’est donc pas instantané. De plus il est réversible, ce qui sous-entend que tant que le blocage n’est terminé, la seule apparition d’une tension VAK positive permet de rétablir un courant d’anode.
Lorsque le blocage est terminé, la jonction JC est dans le sens direct alors que les jonctions JA et JK sont dans le sens inverse. Ce sont ces deux dernières qui supportent la tension VAK. Le courant inverse est alors très faible. Si nous envoyons un courant de gâchette dans cette situation, les jonctions JA et JK ne peuvent se mettre en régime d’avalanche et le thyristor ne s’amorce pas.
Si la tension V est rendue de plus en plus négative, les jonctions JA et JK se mettent en régime d’avalanche pour une certaine valeur de VAK mais aucun amorçage ne se produit. La tension aux bornes du thyristor reste pratiquement égale à la tension de claquage (très élevée).
Propriétés pratiques
Données du fabricant
Les données sont dépendantes du type de thyristor et des fonctions que ces derniers devront accomplir.
- Intensité moyenne maximale Im : elle est donnée par un courant mono alternance
- Tension maximale inverse Uip
- Courant de maintien Ih
- Chute de tension δu
- Intensité du courant de gâchette produisant à coup sûr l’amorçage Igm
- Durée de désamorçage
Le courant de gâchette
Le courant de gâchette nécessaire à l’amorçage varie évidemment avec le type de thyristor. Contrairement à ce que l’on pourrait croire, ce courant varie aussi d’un thyristor à l’autre, à l’intérieur d’une même série de thyristors dits « identiques ».
Un équipement comportant des thyristors doit fonctionner sans défaillance et par conséquent, il ne peut être toléré qu’un thyristor présente des ratés d’allumage et reste bloqué alors qu’il doit conduire. Pour ces raisons, le fabricant précise, pour chaque type de thyristor, l’intensité Igm du courant de gâchette qui produit à coup sûr l’amorçage pour n’importe quel élément de la série et ce, quelle que soit la valeur positive (>= 1,5V) de la tension VAK appliquée entre A et K.
Durée de l’amorçage
Ce temps caractérise la période nécessaire à l’établissement du courant principal (entre l’anode et la cathode) après injection d’un courant de gâchette à front raide. Cela sous-entend une impulsion faisant passer, par exemple, le courant de gâchette de 0 à 100mA en une microseconde. Ce temps est de l’ordre de 10us.
Durée de blocage
Après disparition du courant de gâchette, ce temps caractérise la période au bout duquel le thyristor supporte à nouveau, sans s’amorcer, une tension directe. Ce temps est de l’ordre de quelques dizaines de micro-secondes.
Angle de retard
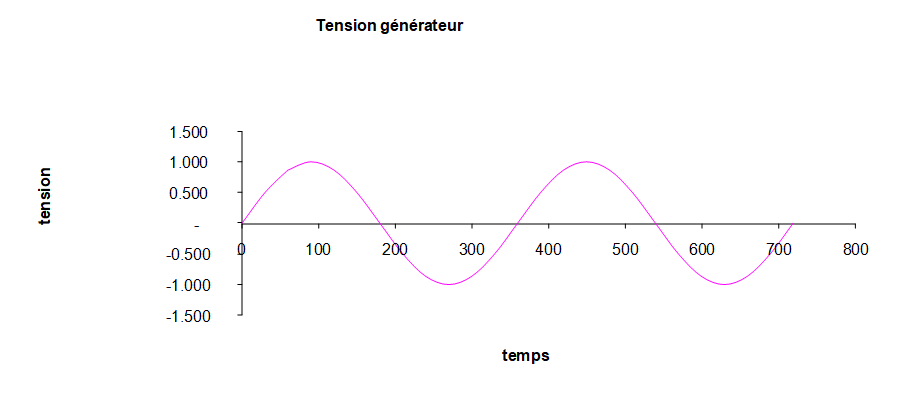
Nous savons à présent que le thyristor pour pouvoir se mettre en conduction doit vérifier deux points important, avoir une tension directe aux bornes du thyristor (anode et cathode) et recevoir une impulsion de gâchette. Si dans le cas d’une diode, la conduction se réalisait à la seule condition que la tension soit directe, dans notre cas cela peut ne pas être le cas. En pratique, je dois donc placer un générateur d’impulsion afin de commander cycliquement la gâchette du thyristor. Analysons pour le schéma ci-dessous l’allure des tensions.
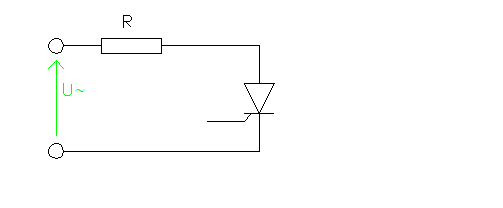
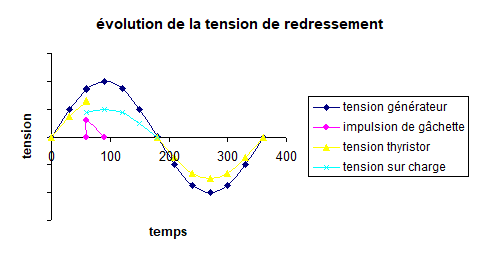
Précisons que pour une meilleure visibilité, la tension du générateur à été amplifiée par un facteur 2, que la tension thyristor à été amplifiée d’un facteur 1 ,5 et que les autres tensions sont à l’échelle 1/1.
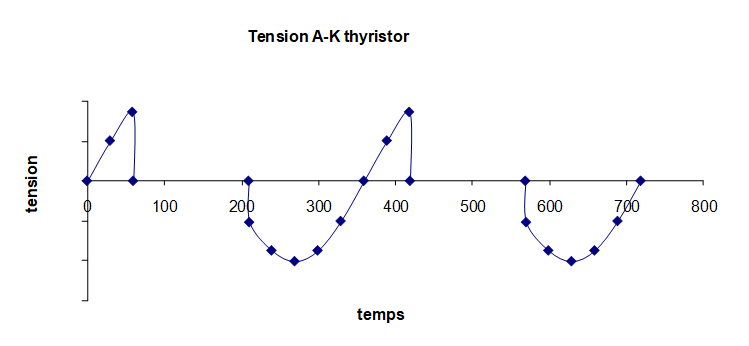
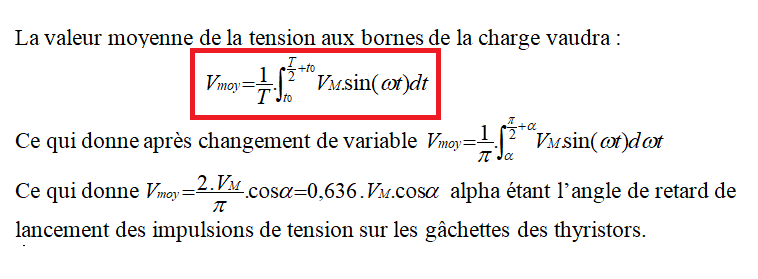
On remarque clairement que durant la conduction, la tension du thyristor est inexistante. Lors de cette même conduction, le tension apparaît aux bornes de la charge puisque nous avons circulation d’un courant. Le cas dessiné montre que l’impulsion de gâchette à été donnée 60° après le passage en positif de la tension générateur. On voit dès lors que le thyristor ne conduira que 120°. La tension aux bornes de la charge sera donc fonction de ce temps de conduction.
Le temps « t1 » est donc le retard à l’allumage du thyristor par rapport au passage en positif de la tension générateur. L’angle correspondant à est l’angle de retard. Il peut être réglé (théoriquement) entre 0 et 180°.
Modes de fonctionnement du thyristor
Les circuits de commande des thyristors sont, en général, des circuits permettant de délivrer des impulsions de tension dont on sait régler la fréquence et l’amplitude du signal de sortie. Au niveau du type de tension d’alimentation, le thyristor peut être soumis à :
- une tension alternative. Dans ce cas, le thyristor se bloque de lui-même à la fin de chaque alternance.
- Une tension continue. Dans ce cas, le circuit de commande d’amorçage du thyristor doit être complété par un circuit de blocage du thyristor.
Au niveau de la tension de gâchette, deux cas peuvent se présenter :
- La tension de commande reste présente pendant tout le temps de conduction du thyristor. Dans ce cas, le circuit de commande peut être complété par un dispositif qui réduit ou supprime le courant de commande avant et après l’amorçage du thyristor, de façon à éviter les pertes au niveau du circuit de gâchette.
- La tension de commande se présente sous forme d’impulsion de tension. C’est ce mode de commande qui est utilisée dans la plupart des cas. Les avantages sont les suivants :
- Faible puissance dissipée dans le circuit de gâchette, même avec des impulsions largement dimensionnées.
- Evite les amorçages intempestifs. La gâchette peut être maintenue au potentiel de la cathode entre deux impulsions de commande.
- Séparation électrique entre le circuit de commande et le circuit de puissance. Dans ce cas, les impulsions sont transmises à la gâchette par l’intermédiaire d’un condensateur ou d’un transformateur.
L’amorçage
C’est le passage de l’état bloqué à l’état passant lorsque le thyristor est alimenté sous tension directe. On emploie également l’expression : déclenchement du thyristor. L’amorçage est obtenu par application d’un courant de gâchette. Tant que l’impulsion est insuffisante en intensité et en durée, la conduction du thyristor est rapide, précise et sure. Noter que une impulsion de gâchette trop faible ou trop courte peut provoquer l’autodestruction du thyristor. Dans ce cas de figure, la portion de jonction qui s’ouvre sous l’influence du courant de gâchette est trop petite et le passage du courant de l’anode vers la cathode crée lors du passage un échauffement thermique entraînant la fusion du semi conducteur.
Une autre situation peut encore se présenter et expliquer l’amorçage d’un thyristor polarisé en direct mais à un potentiel bien en deçà du seuil d’amorçage par retournement et sans courant de gâchette. Il se fait que la jonction JC, comme toute autre, possède une capacité parasitaire Cp. Cette capacité illustre le fait que la jonction de commande n’est pas parfaitement bloquante.
C’est cette capacité qui, sous l’action d’une variation brusque de la tension anode-cathode, se charge et fait en sorte d’être le siège d’un courant ayant le même sens que le courant de gâchette. Il est aisé de comprendre que cette situation n’est pas à exploiter pour éviter les déclenchements intempestifs.
Si la puissance thermique dissipée par le thyristor est supérieure à celle que peut évacuer son système de refroidissement, la température des jonctions va augmenter. Or on sait que le courant inverse d’une jonction augmente avec la température. Dès lors, si pour une raison ou l’autre, la température des jonctions vient à monter, le courant de fuite de cette jonction augmente et peut être suffisant pour amorcer le thyristor. Noter que le seuil de tension de retournement diminue en fonction de l’élévation de température.
Le blocage
C’est la passage de l’état passant à l’état bloqué lorsque le thyristor est sous tension directe. Le blocage se produit lorsque le courant anode-cathode s’annule de façon naturelle ou forcée ou lorsque la tension anode-cathode s’annule.
Applications
Redressement commandé avec 1 thyristor

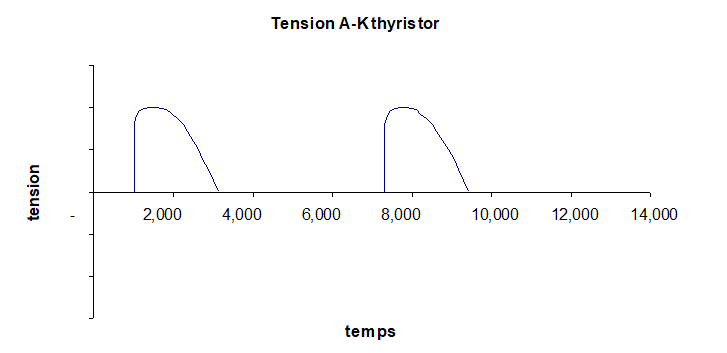
Les allures des tensions aux bornes de la charge et du thyristor nous donnent :
Sans diode de roue libre:
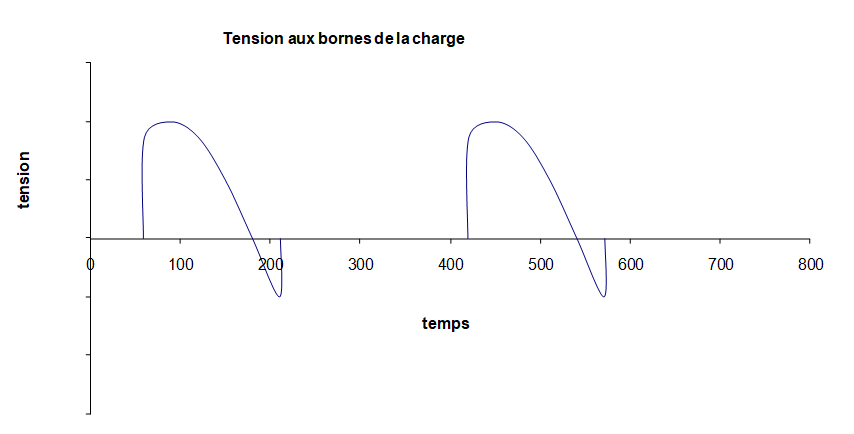
Les courbes nous montrent que le thyristor devient passant après un angle de retard. Ce retard passé, nous appliquons un courant de gâchette et amorçons le thyristor. Ce dernier sera passant jusqu’au changement de polarité à ces bornes. Nous pourrions croire que ce point de basculement correspondra au passage par zéro de la tension du générateur. Les courbes nous montrent que le thyristor continu à conduire malgré le passage en négatif de la tension du générateur. En effet, nous avons bien dit que le thyristor conduirait tant que le potentiel à ces bornes resterait positif. Hors nous venons de voir que le potentiel côté anode était devenu négatif. Cela veut dire que le potentiel côté cathode doit donc être plus négatif qu’à l’anode pour expliquer la conduction du thyristor. En réalité, nous nous trouvons dans cette situation car la charge ayant emmagasinée de l’énergie magnétique, elle va pouvoir maintenir un potentiel à ces bornes et ce potentiel va permettre au thyristor de conduire jusqu’à évacuation de cette énergie. Si cette situation ne nous pose aucun problème dans notre cas, il est d’autre cas ou nous pourrions avoir des problèmes. Imaginez-vous deux thyristors placés pour réaliser un redressement bi-alternance, que se passerait-il si le premier thyristor n’est pas éteint lorsque le second se mettra en conduction ? Nous aurons un court-circuit entre phase avec claquage des composants. Pour pallier à cela, nous devons forcer l’arrêt du thyristor en utilisant un artifice qui permettra d’évacuer l’énergie emmagasinée par la charge. Pour ce faire, nous utiliserons une diode de roue libre.
Avec diode de roue libre:
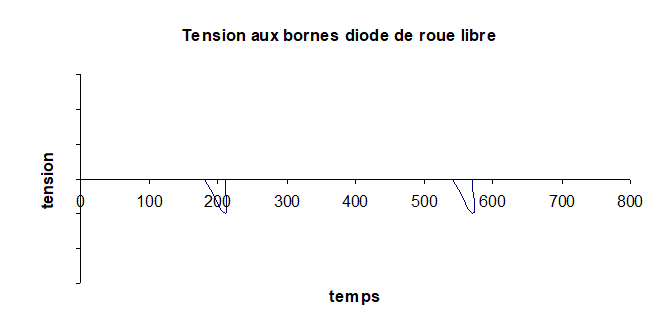
Je peux remarquer que la diode de roue libre permet un blocage du thyristor dès la mise en conduction de cette dernière. La conduction de cette diode sera donc réalisée lorsque son potentiel la rendra passante, autrement dit lorsque la tension du générateur passera dans son alternance négative. La diode de roue libre va donc réaliser un bypass permettant à la charge d’évacuer son énergie tout en faisant circuler un courant. Une fois cette énergie évacuée, la diode se bloquera à nouveau. Je rappel que dans un premier temps, lors de la conduction du thyristor la charge est un récepteur mais lorsque la diode de roue libre conduit, la charge est un générateur. Ne perdez pas de vue que le courant lui circule toujours dans le même sens.
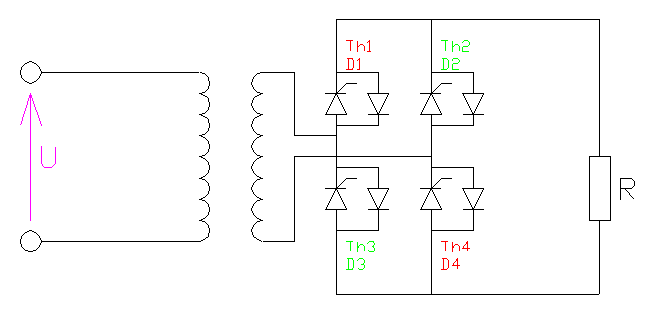
Redressement commandé avec 2 thyristors
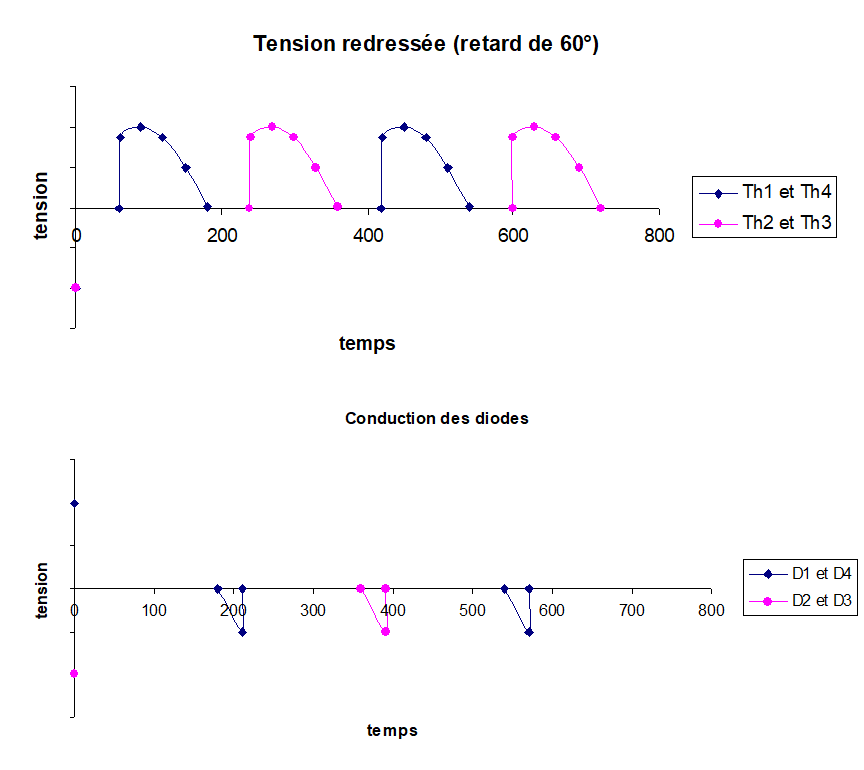
Voici le cas industriel sans aucun doute le plus souvent utilisé en industrie. Le système triphasé fonctionne exactement de la même façon. Nous savons dans ce cas de figure que deux thyristors fonctionneront ensemble en mode passant pendant que les deux autres seront en mode bloqué. Ce que nous venons de voir dans la situation précédente va ce confirmer sur cette application. Analysons l’allure des courbes de tension.
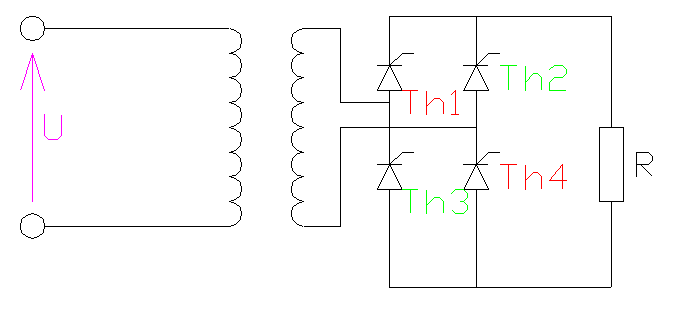
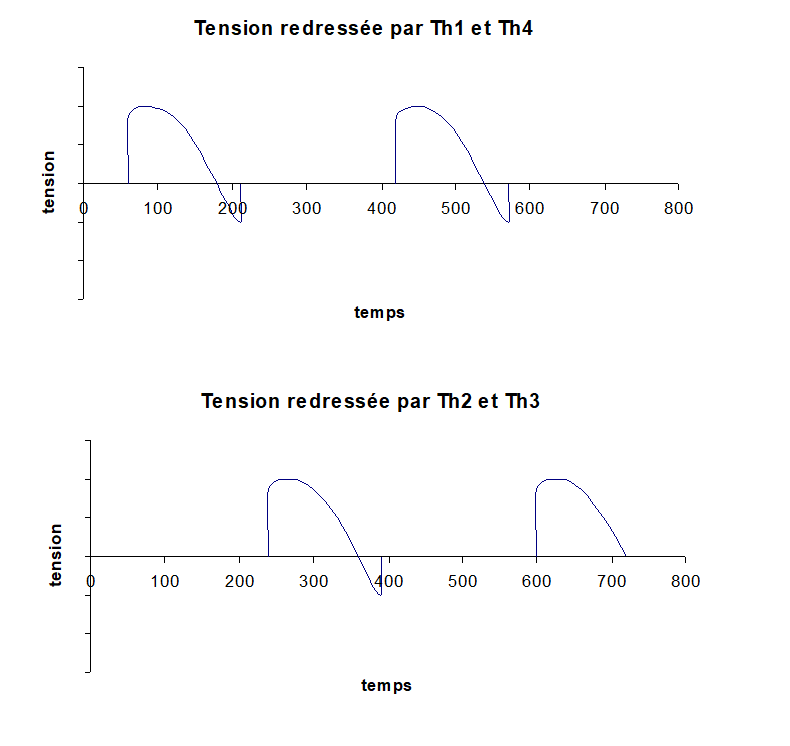
Tout comme pour le redressement par diode, nous remarquons que deux thyristors étant polarisé en direct de façon simultanée, ils seront deux à conduire et ce pendant une demi alternance. La seconde demi-alternance mettra en conduction les deux autres thyristors. Nous pouvons encore remarquer que les thyristors conduisent pendant un certain sous tension négative. Etant donné que l’angle de retard est plus important que le temps de blocage du thyristor, nous n’avons pas de problème. Cette méthode nous permettra donc une régulation de t1 > temps de mise en repos d’un thyristor et 180°. Pour certain thyristor, cette période de réglage est petite. Comme l’utilisation la plus classique de ce type de pont à thyristor est la commande de moteur courant continu avec variation de la vitesse par action sur la tension d’alimentation, nous comprendrons que notre plage de réglage sera d’autant plus réduite que l’angle de retard sera grand. Nous pouvons donc améliorer le système en plaçant en parallèle sur chaque thyristor une diode ou un autre thyristor qui aura pour rôle de ce mettre en conduction et ainsi de forcer le blocage du thyristor. Le schéma devient alors le suivant et les courbes correspondante nous montrent la possibilité de réaliser une régulation avec un angle de retard presque nul.
Fonctionnement en onduleur
Si certaine application exige de réaliser un redressement pour l’attaque de moteur courant continu, d’autre application devront réaliser un réglage de vitesse en jouant sur une tension variable. L’électronique de puissance peut nous aider également dans ce cas de figure. Nous allons reformer un signal alternatif au départ d’un signal continu en réalisant un hachage. Ce dernier sous entend les conductions à un moment précis et durant un temps précis des thyristors.
Pour réaliser ce type de fonctionnement, nous utiliserons des doubles ponts de thyristor. La synchronisation des impulsions de gâchette seront très important. En pratique, le changement de consigne de l’angle de retard commun à l’ensemble du système sera réalisé par l’intermédiaire d’un potentiomètre. Pendant la formation de la première alternance de notre signal alternatif, seul deux thyristors réaliseront les conductions et deux autres placés en parallèle permettront de les bloquer. Nous pourrons ici exploiter le fait que le thyristor s’il n’est pas complètement bloqué peut s’amorcer à nouveau instantanément.
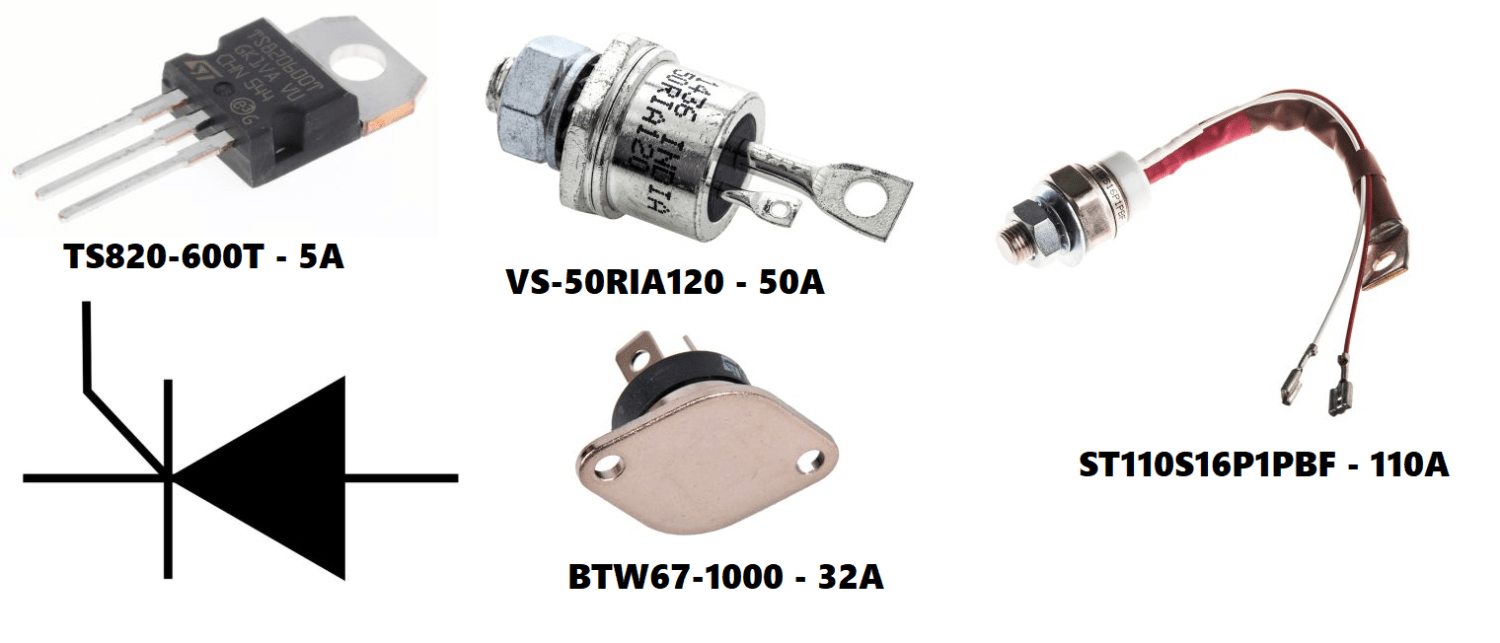
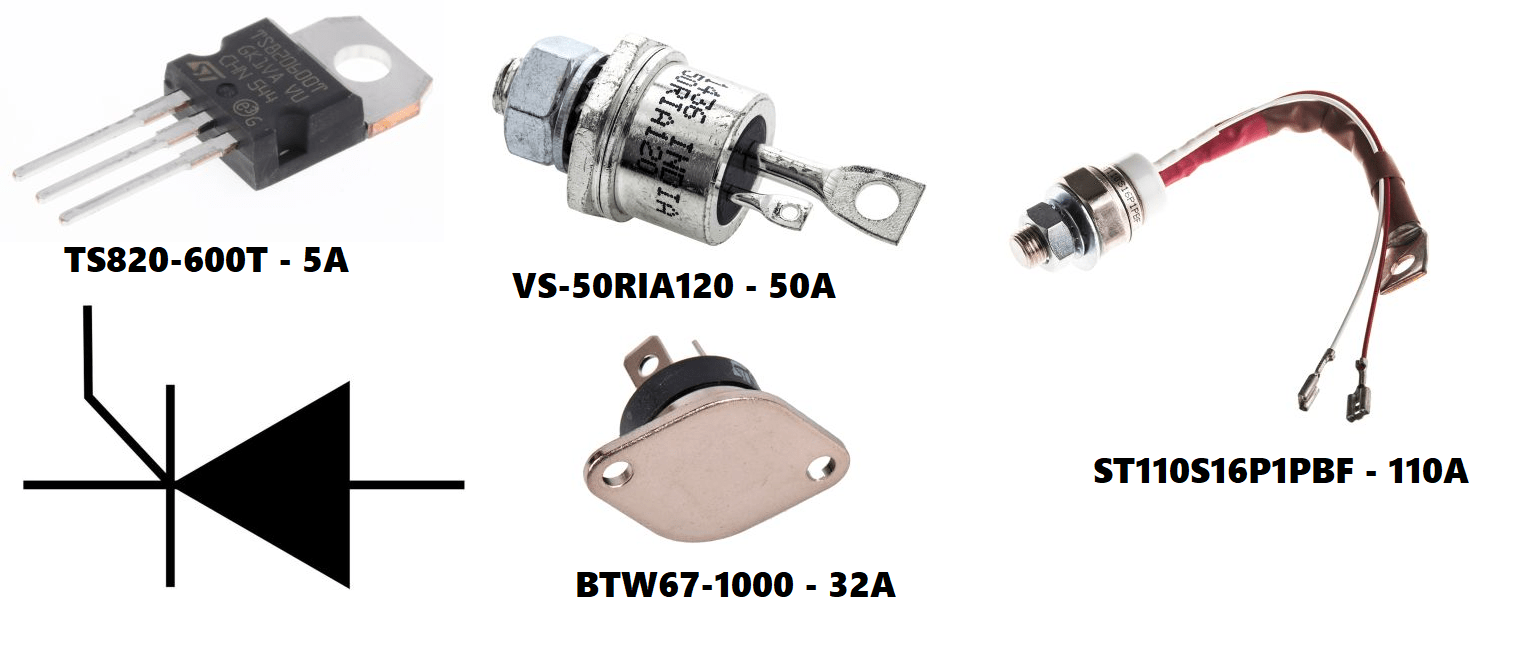
Exemples (datasheet)
- ITRMS : valeur efficace du courant
- ITAV : valeur moyenne du courant
- IGT : courant d’amorçage par la gâchette
- VDRM : tension de pointe répétitive à l’état bloqué
- VTM : tension de crête à l’état passant
- : vitesse de croissante du courant à l’état passant
- : vitesse de croissance de la tension à l’état bloqué
- tq : temps de désamorçage
Thyristors ordinaires
| Type | ITRMS (A) | ITAV (A) | VTM (V) | VDRM (V) | IGT (mA) | (A/us) | (V/us) |
| TYN806 | 8 | 3,8 | 1,6 | 600 | 15 | 50 | 50 |
| TBW48-800 | 50 | 32 | 1,8 | 800 | 60 | 100 | 200 |
| TN933 | 1900 | 1210 | 1,35 | 1400 | 200 | 300 |
Thyristors rapides
| Type | ITRMS (A) | ITAV (A) | VTM (V) | VDRM (V) | IGT (mA) | (A/us) | (V/us) |
| BT150 | 6 | 4 | 500 | 40 | 200 | 200 | |
| TLF4006 | 3 | 2 | 2,2 | 400 | 50 | 100 | 100 |
| TF91514B | 1560 | 955 | 1,75 | 1400 | 200 | 800 | 300 |