Objectifs
- Comprendre la boucle d’asservissement de l’angle d’un drone bicoptère
- Savoir différencier entre la consigne de la vitesse et celle de l’angle
- Les précautions à prendre durant l’assemblage du drone bicoptère
- Voir le tuto pour de détails.
Les précautions à prendre durant l’assemblage du drone
Pour que votre drone décolle, quelques précautions sont importantes et pour gagner du temps. Le sens de rotation des moteurs ainsi le type des hélices sont primordiales. Un mauvais choix de l’un des deux entrainera un déséquilibre naturel du drone ou bien l’impossibilité de décollage de ce dernier. Les symptômes suivants montre que vous avez fait un mauvais montage au moment d’allumage des moteurs :
- Mon drone n’arrive pas à décoller, l’un des deux pieds reste collé au sol
- Mon drone décolle, mais va dans le côté droit ou gauche
- Mon drone reste collé au sol même si j’augmente le rapport cyclique à 140 voire plus !
Pour régler ces problèmes voilà une démarche à suivre durant le montage et test de votre drone :
- Câblez les deux moteurs dans deux sens opposé : Premier moteur (Rouge, Noir, Jaune), Deuxième moteur (Rouge, Jaune, Noir). Inverser uniquement deux dernier phases, la phase rouge reste identiques pour les deux moteurs.
- Concernant les hélices, elles doivent être du type opposé : Une horaire, l’autre antihoraire. Pour savoir si les deux hélices sont identiques ou opposées. Positionnez l’une au-dessous de l’autre et voir si elles sont parallèles (même type) ou décalée (type opposé).
- Le sens de rotation du moteur doit être en adéquation avec le type de l’hélice. Pour savoir quelle hélice pour quel moteur, on peut faire un test pratique : Brancher les deux hélices, fait un test de décollage, si le drone décolle alors votre câblage est bon sinon inverse la position des deux hélices.
Attention : Les moteurs brushless ne tournent pas au chaud ! Si par exemple vous essayez de faire tourner les moteurs directement avec un rapport cyclique égal à 50%, 60%, etc. Les moteurs ne vont pas tourner. Il est nécessaire de faire grimper le rapport cyclique (0 (0%), 180 (100%)) progressivement, par exemple de 20 jusqu’à l’allumage des moteurs. Avec une télécommande, la procédure se fait d’une façon naturelle (par défaut le drone est au sol ensuite on augmente la vitesse progressivement). On verra dans le tuto prochain la procédure de démarrage automatique des moteurs sans télécommande.
Fonctionnement

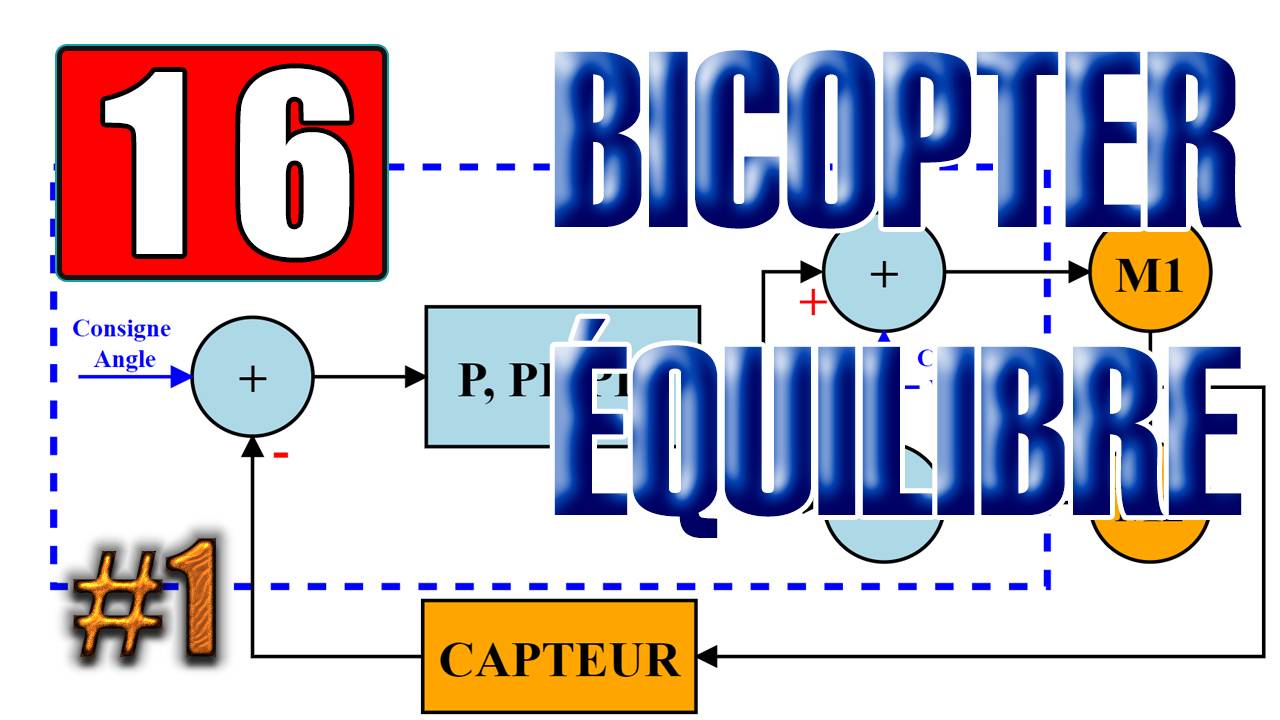
Le tuto introduit l’architecture globale de l’asservissement angulaire d’un drone bicopter. Elle consiste à mettre le drone en équilibre quelque soit la vitesse de rotation des moteurs. D’une autre façon, assurer l’équilibrage du drone dans diverses altitudes. On dispose de deux consignes :
Consigne de l’angle : La valeur de l’angle désirée durant l’équilibre. La valeur de la consigne angulaire est fixée à 0° (position de l’équilibre). Il est envisageable d’équilibre le drone dans une position inclinée (angle positive ou négative non nulle).
Consigne de la vitesse : la consigne de la vitesse est une valeur variable et ajustable par l’utilisateur du drone en fonction de l’altitude désirée. L’utilisateur peut agir sur la vitesse de 0% à 100%. Typiquement elle est ajustée par une télécommande (voir le tuto pour plus de détails).
Le prochain tuto sera dédié à l’implémentation de la boucle d’asservissement avec Arduino avec l’action proportionnel(P).