VIDEO
Objectifs
Savoir faire la commande multimodes d’un automate
Savoir utiliser le module IR
Test des capteurs à ultrasons
Savoir mesurer la distance avec un capteur à US
Savoir lire le code d’une télécommande IR
Comprendre le principe de fonctionnement de la commande IR
Etc.
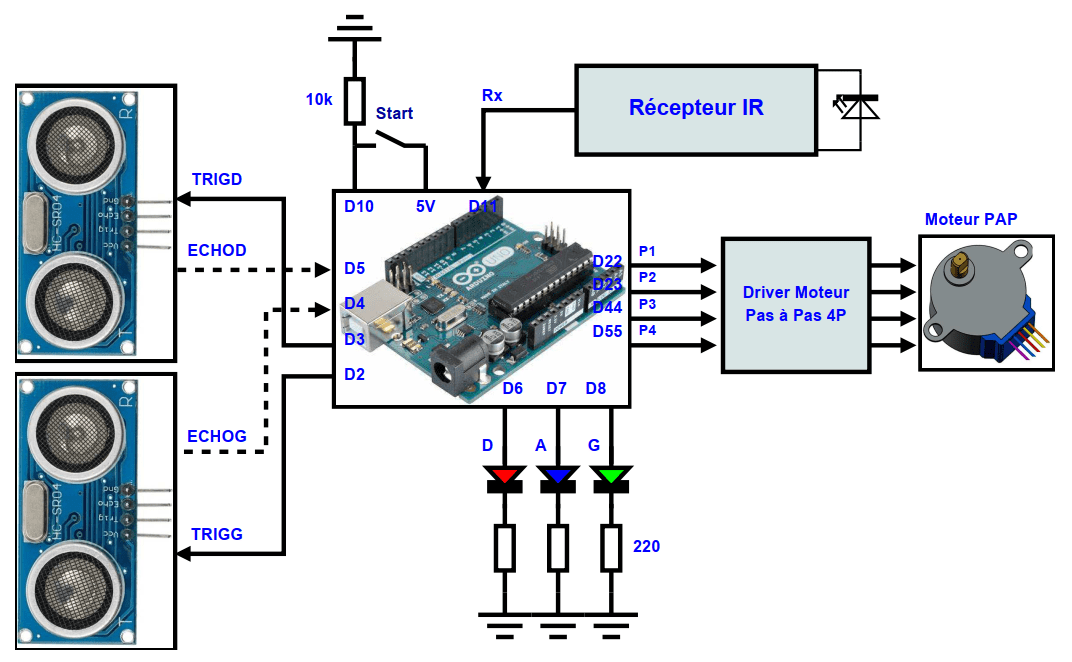
L’objectif du tuto est de valider le fonctionnement des capteurs de distances à ultrasons. Ils seront utilisés pour la mesure de la distance droite et gauche. Voir le tuto pour les détails techniques.
Schéma synoptique
Programme Arduino
#define Trig_out_pin_g 2
Obtenir le livre « Codage en C du GRAFCET avec ARDUINO