Objectifs du projet
- Savoir comment adapter la logique Arduino (5V) et FPGA (3.3V) (technique originale moins couteuse)
- Savoir comment Transfer chaque bits du convertisseur A/D de l’Arduino
- Savoir comment passer de 10 bits à 8 bits du convertisseur A/D
- Savoir comment modéliser une source de la tension variable (Capteur de la température actif)
Analyse de fonctionnement
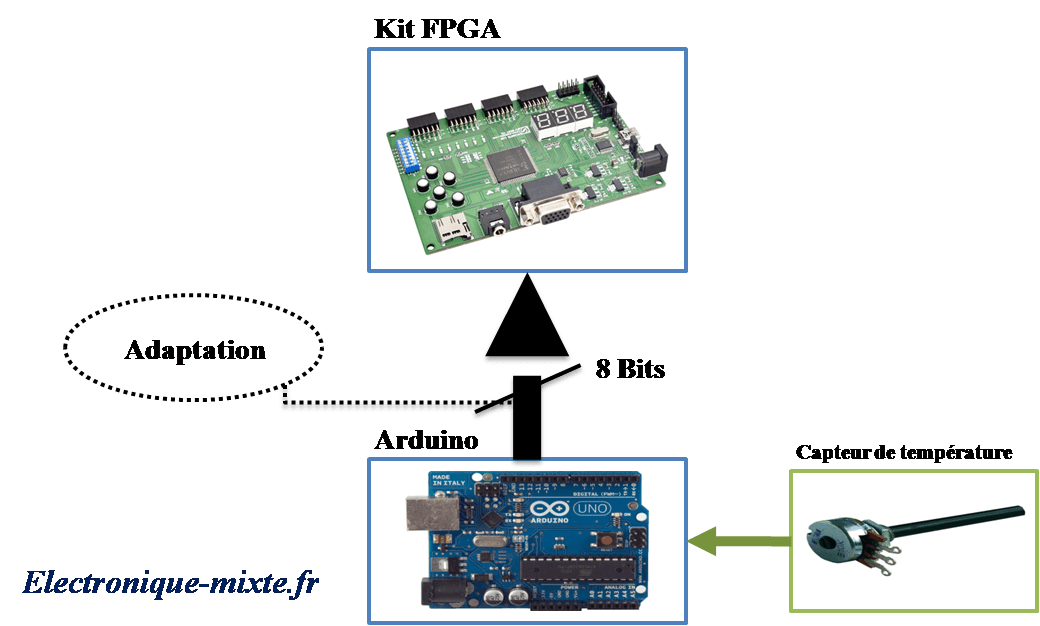
Le projet consiste la mesure et l’affichage de la distance par un capteur ultrasonique en onction de la température ambiante par FPGA et Arduino. Le principe de mesure utilisé est la mesure de la largeur d’impulsion par un compteur haute fréquence (12 MHz).
La deuxième partie du projet sera consacrée à :
- La Conversion de la tension issue du capteur de la température sur 10 bits
- Le Transfère de la valeur numérique à l’FPGA sur 8 bits
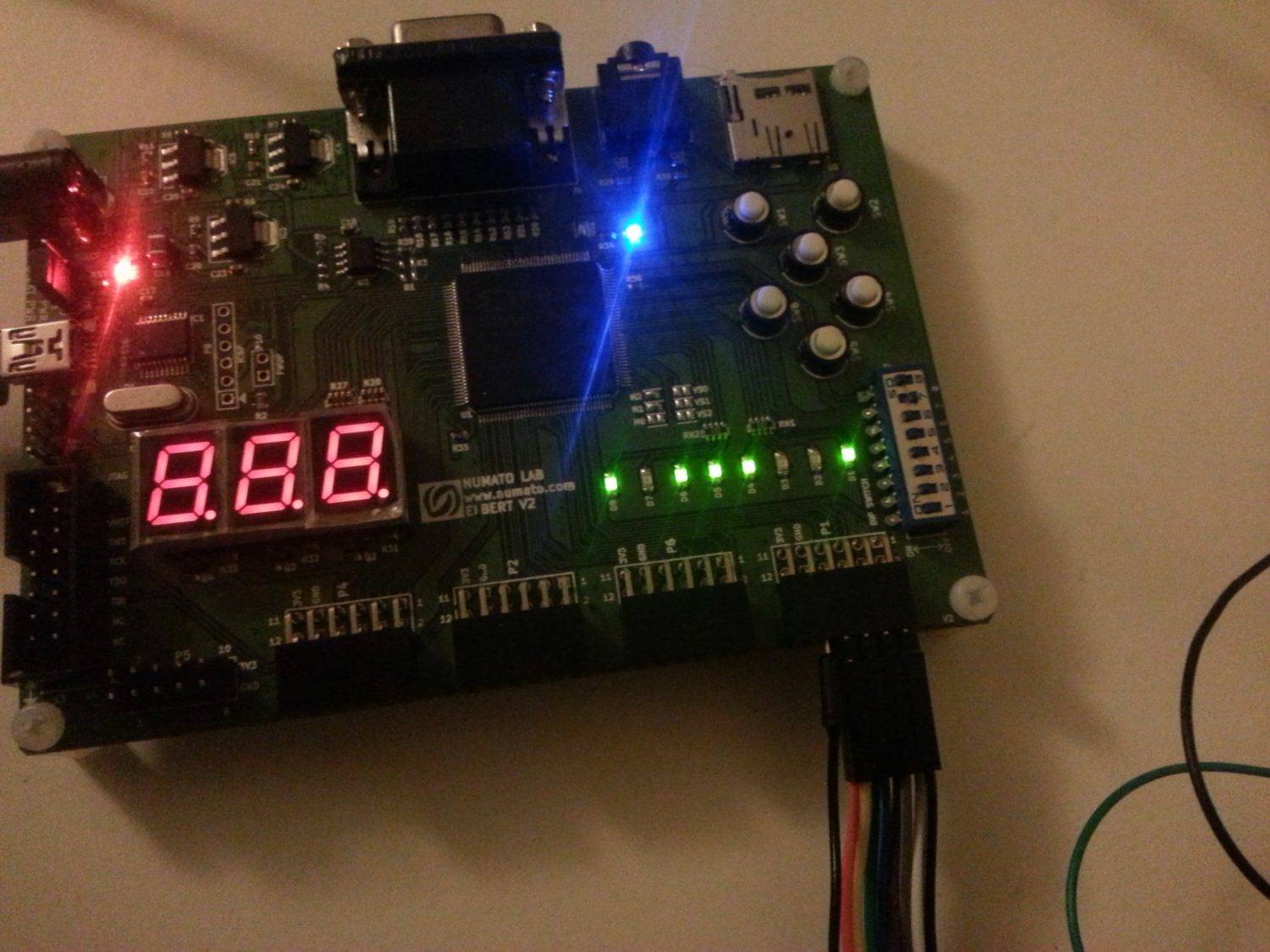
- L’Affichage de la valeur sur 8 bits dans les LED du kit de développement FPGA
- Le système est équivalent à un capteur de température numérique sur 8 bits.
La partie deux du projet permet de simuler un capteur de température numérique qui sera intégré dans le calcul de la distance en fonction de la température au cœur de l’FPGA.
Adaptation des niveaux logiques entre FPGA & Arduino
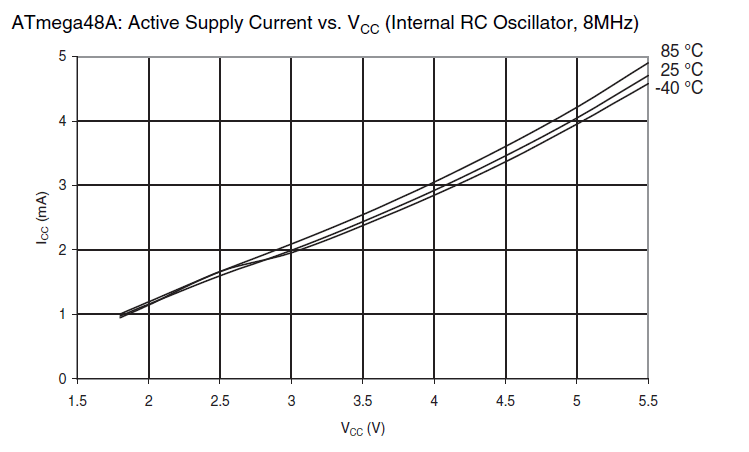
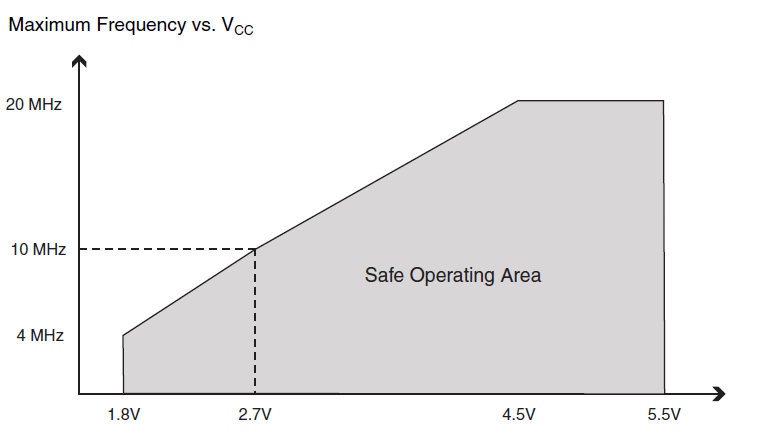
D’après les deux graphes tirés du Datasheet du microcontrôleur ATMeg48A, la tension de fonctionnement de l’Arduino peut varie entre 1.8-5.5V, ainsi que la fréquence maximale dépend de la tension d’alimentation.
L’idée qui vient de l’esprit et de faire fonctionner le microcontrôleur avec une tension d’alimentation de 3.3V ! La solution évidente est de changer le régulateur de 5V dans le kit de développement avec un autre régulateur de la tension de 3.3V [Lien de l’article]. Cette solution demande un nouveau circuit intégré + le travail de dessoudage & soudage du nouveau composant 🙁
La deuxième solution qui me semble pertinente et moins couteuse et d’alimenter le kit de développement Arduino avec une source d’alimentation de 5V externe MAIS dans la bouche Vin en débranchant le câble USB !! J’ai constaté que le niveau haut des sorties est de l’ordre de 3.8 V <5V !!
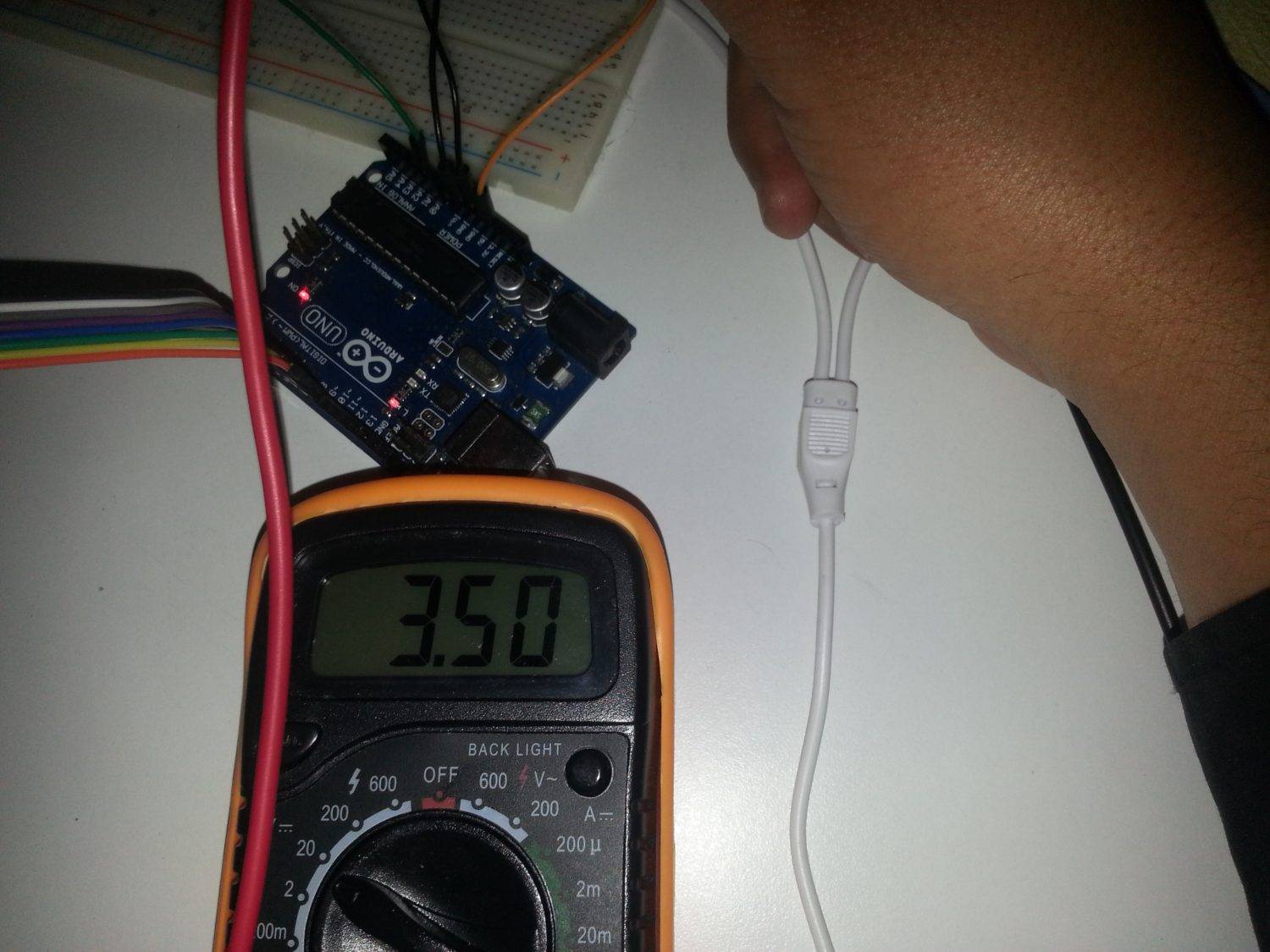
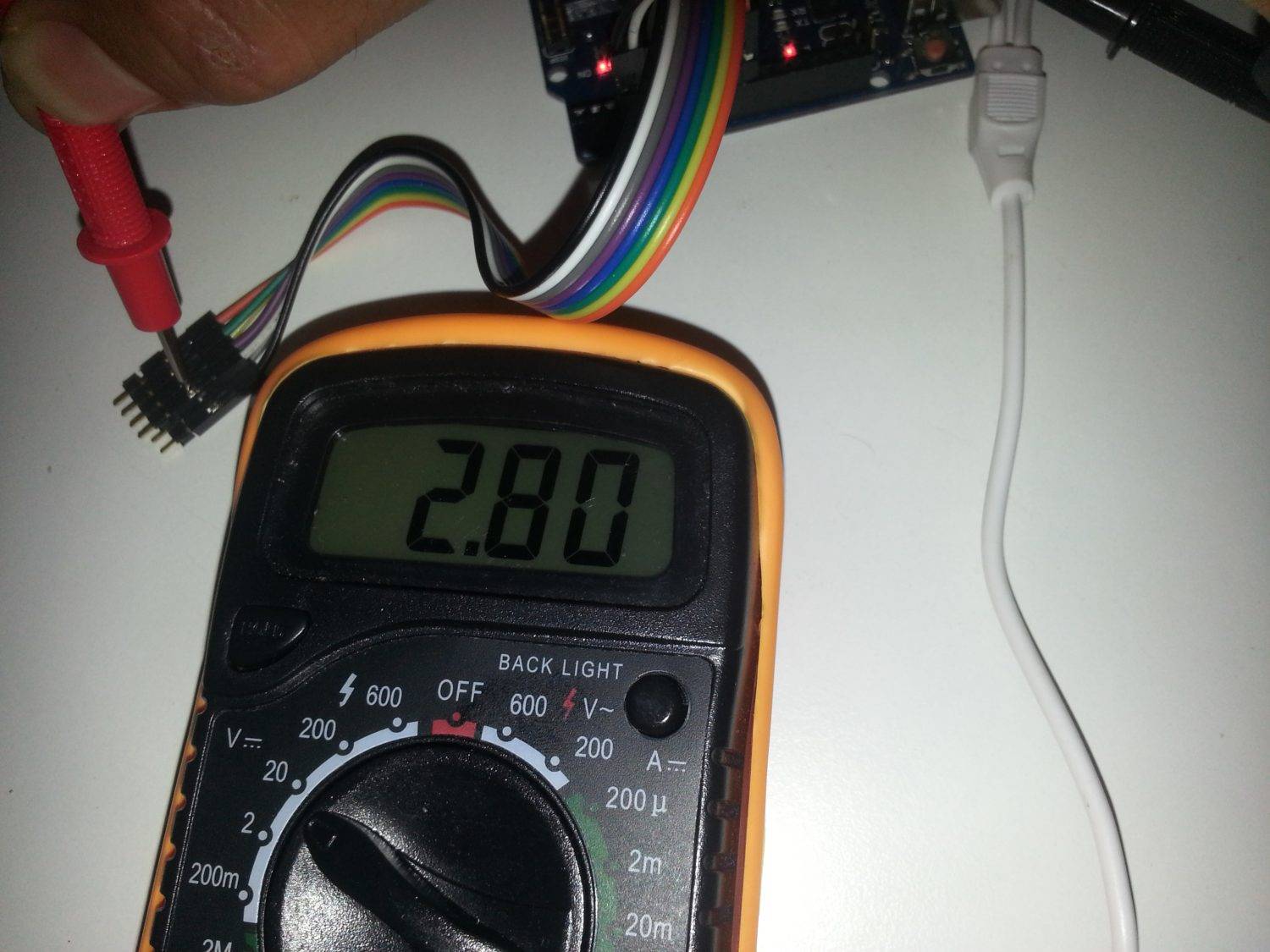
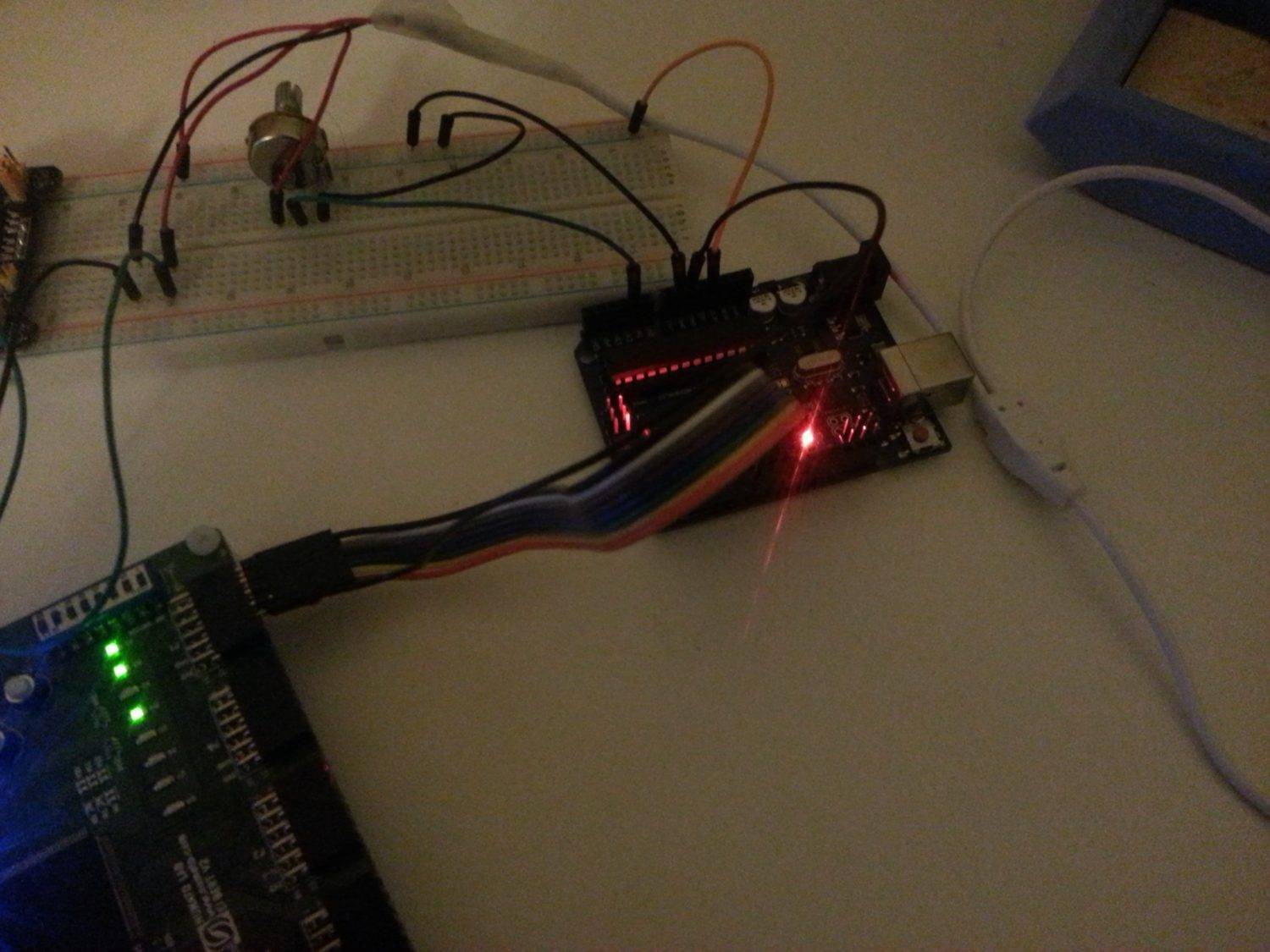
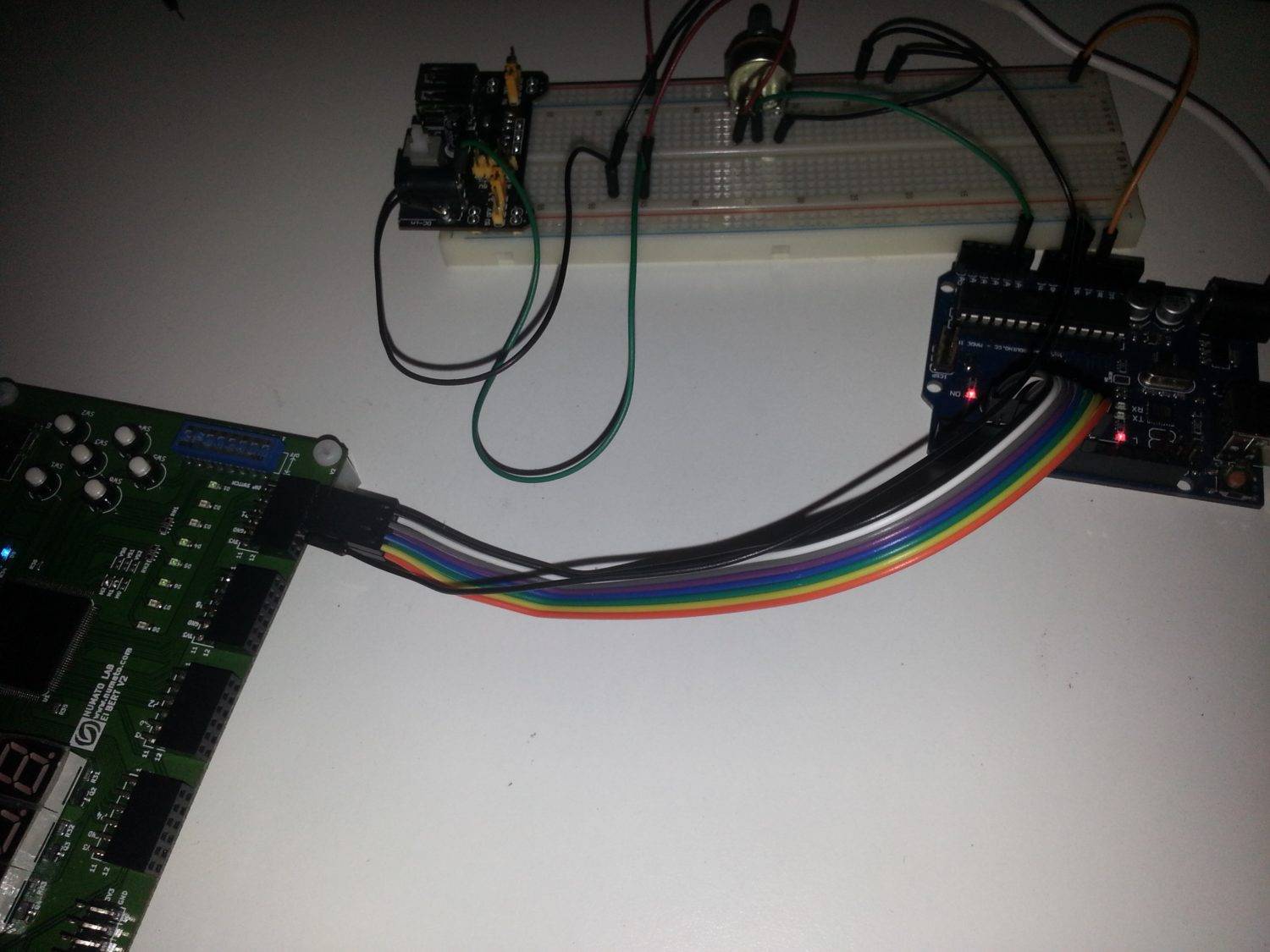
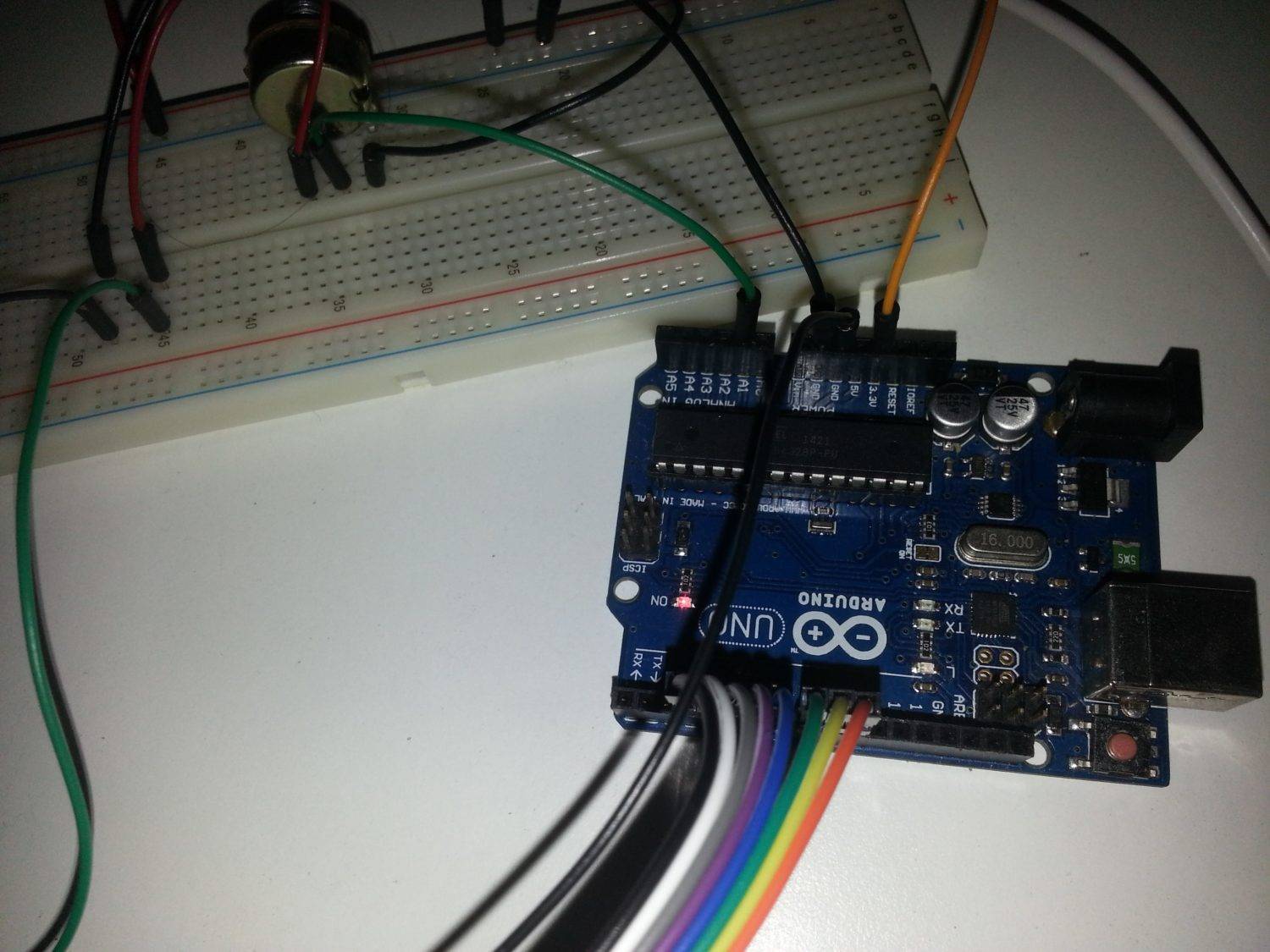
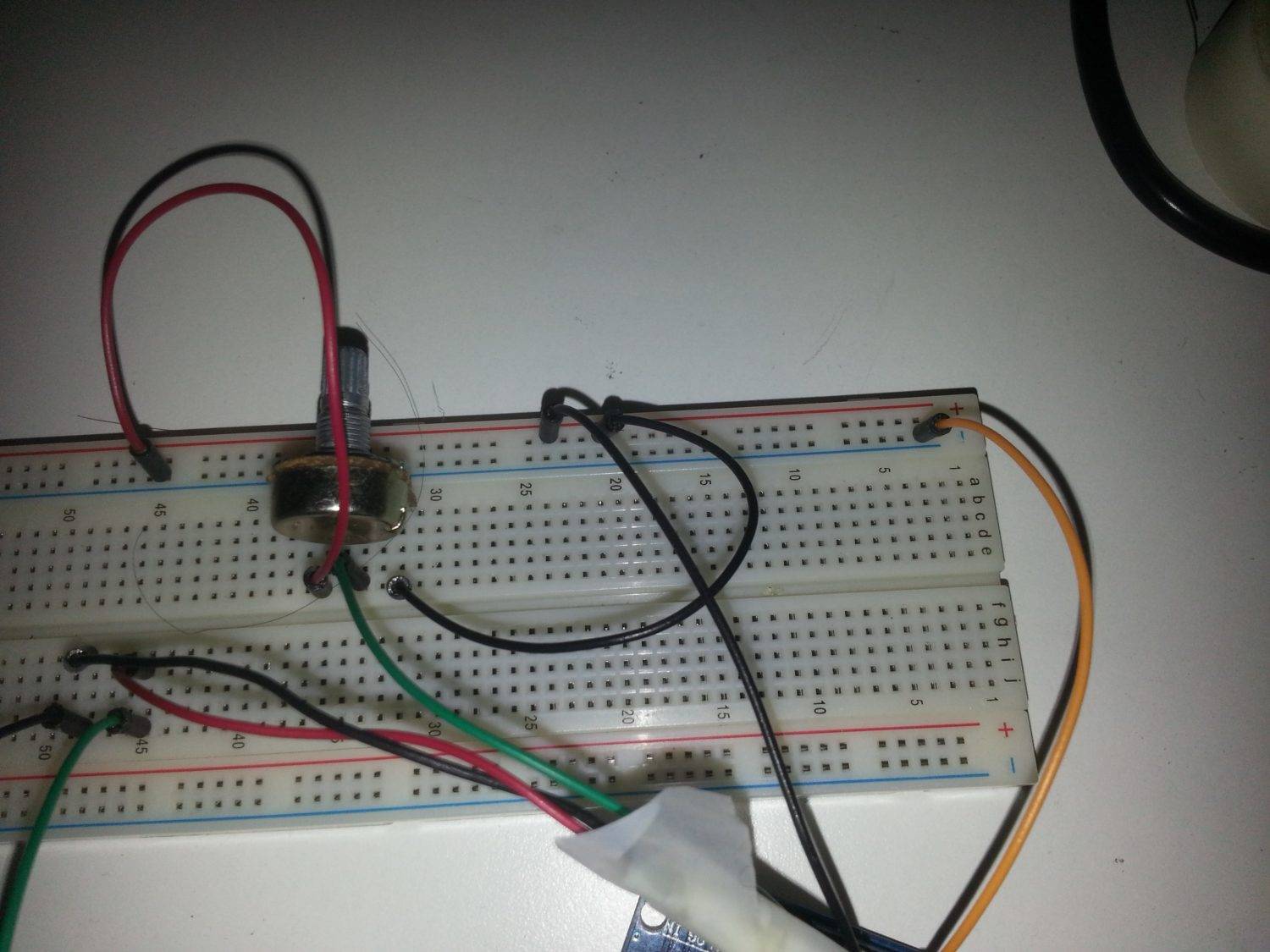
Ou bien alimenter le Kit Arduino avec une alimentation externe de 3.3V dans la broche 3.3V. Danc ce projet l’adaptation se fait par une alimentation externe de 3.5V (voir le photo ci-desous), le niveau logique correspond est de 2.8V dans les pins de l’Arduino qui seront reliés avec la carte FPGA.
Assurez bien que le câble USB qui relie l’ordinateur et l’Arduino est bien débranché lorsque le kit Arduino est branché avec le kit FPGA, dans le cas contraire vous risquez de griller les ports de l’FPGA !
Dans notre cas c’est compatible avec les pins du PPGA qui peuvent supporter une tension maximale de 4.1V [DataSheet] (3.3 V Type) !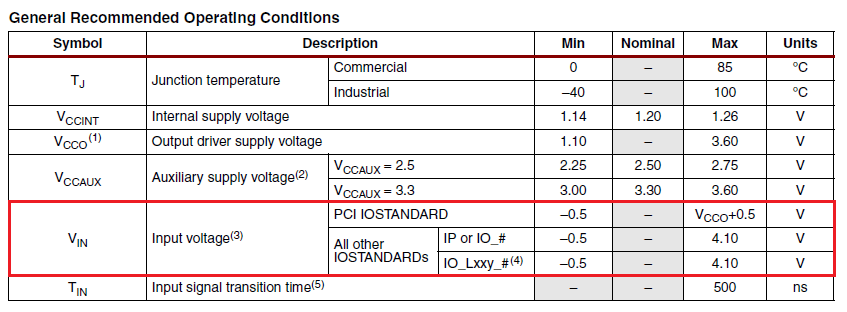
Capteur de la température
Deux grands types de capteurs permettent de mesurer les températures en continu:
-
Les thermocouples
La résistance électrique d’un conducteur métallique croit avec la température. Les lois de variation étant très régulières, il est possible de les utiliser pour repérer les températures par des mesures de résistance. Cette variation est parfaitement réversible. On peut donc établir une relation entre la résistance R et la température T et ainsi relever T en mesurant R.
Différents métaux peuvent être utilisés comme le nickel et le cuivre mais c’est le platine qui est couramment utilisé car il offre l’étendue de mesure la plus grande (-250 à 1100 °C).
-
Les sondes métalliques
Dans un circuit comportant deux conducteurs de nature différente il apparaît une force électromotrice lorsque la variation de température est appliquée entre les deux soudures du couple ainsi formé. Le générateur thermoélectrique fournit une différence de potentiel (ddp) directement exploitable à l’entrée d’un amplificateur. Cette ddp est fonction de la différence de température entre la jonction dite de mesure (appelée aussi soudure chaude) et celle de référence (appelée aussi soudure froide) supposée connue.
Plus de détails : Lien 1 & Lien 2
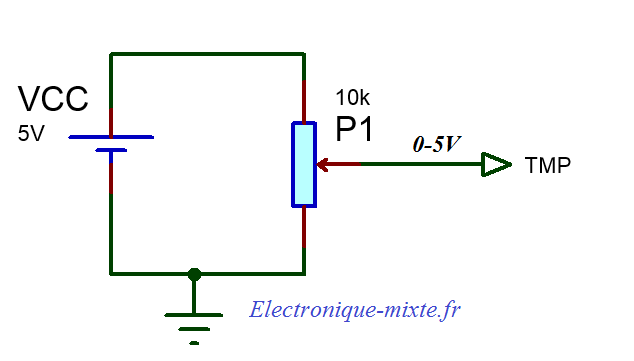
Dans ce projet on a modélise le capteur par une résistance variable (un potentiomètre)[Figure ci-dessous] en fonction de la température, la tension de sortie variée entre 0 et 5V l’image de la température 0° et 100°.
Code Arduino du projet électronique
const int TempPin = A1;
int TempValue = 0;
const int OUT0 = 3;
const int OUT1 = 4;
const int OUT2 = 5;
const int OUT3 = 6;
const int OUT4 = 7;
const int OUT5 = 8;
const int OUT6 = 9;
const int OUT7 = 10;
void setup() {
// déclaration des variables
pinMode(TempPin, INPUT);
pinMode(OUT0, OUTPUT);
pinMode(OUT1, OUTPUT);
pinMode(OUT2, OUTPUT);
pinMode(OUT3, OUTPUT);
pinMode(OUT4, OUTPUT);
pinMode(OUT5, OUTPUT);
pinMode(OUT6, OUTPUT);
pinMode(OUT7, OUTPUT);
}
void loop() {
// Lecture du capteur de la température
TempValue = analogRead(TempPin);
// Conversion 10 bits ==> 8 bits
TempValue = (TempValue >> 2) & (0x03FF);
// Transfère de la valeur bit par bit
if(TempValue & 0x0001) digitalWrite(OUT0, HIGH);
if(TempValue & 0x0002) digitalWrite(OUT1, HIGH);
if(TempValue & 0x0004) digitalWrite(OUT2, HIGH);
if(TempValue & 0x0008) digitalWrite(OUT3, HIGH);
if(TempValue & 0x0010) digitalWrite(OUT4, HIGH);
if(TempValue & 0x0020) digitalWrite(OUT5, HIGH);
if(TempValue & 0x0040) digitalWrite(OUT6, HIGH);
if(TempValue & 0x0080) digitalWrite(OUT7, HIGH);
//Période de réinitialisation
delay(100);
// Initialisation des sorites
digitalWrite(OUT0, LOW);
digitalWrite(OUT1, LOW);
digitalWrite(OUT2, LOW);
digitalWrite(OUT3, LOW);
digitalWrite(OUT4, LOW);
digitalWrite(OUT5, LOW);
digitalWrite(OUT6, LOW);
digitalWrite(OUT7, LOW);
}Code VHDL du projet électronique
library IEEE;
use IEEE.STD_LOGIC_1164.ALL;
entity TempSens is
Port ( IN_SENS : in STD_LOGIC_VECTOR (7 downto 0);
OUT_LED : out STD_LOGIC_VECTOR (7 downto 0);
RST : in STD_LOGIC;
CLK : in STD_LOGIC);
end TempSens;
architecture Behavioral of TempSens is
begin
PROCESS (CLK,RST)
BEGIN
IF (RST = '1') THEN
OUT_LED <=(OTHERS =>'0');
ELSIF (CLK'EVENT AND CLK='1') THEN
OUT_LED<= IN_SENS;
END IF;
END PROCESS;
end Behavioral;
Fichier des contraintes (pinout) du projet électronique
CONFIG VCCAUX = "3.3" ;
# Clock 12 MHz
NET "CLK" LOC = P129 | IOSTANDARD = LVCMOS33 | PERIOD = 12MHz;
NET "RST" LOC = P70 | PULLUP | IOSTANDARD = LVCMOS33 | SLEW = SLOW | DRIVE = 12;
NET "IN_SENS[0]" LOC = P31 | IOSTANDARD = LVCMOS33 | SLEW = SLOW | DRIVE = 12;
NET "IN_SENS[1]" LOC = P32 | IOSTANDARD = LVCMOS33 | SLEW = SLOW | DRIVE = 12;
NET "IN_SENS[2]" LOC = P28 | IOSTANDARD = LVCMOS33 | SLEW = SLOW | DRIVE = 12;
NET "IN_SENS[3]" LOC = P30 | IOSTANDARD = LVCMOS33 | SLEW = SLOW | DRIVE = 12;
NET "IN_SENS[4]" LOC = P27 | IOSTANDARD = LVCMOS33 | SLEW = SLOW | DRIVE = 12;
NET "IN_SENS[5]" LOC = P29 | IOSTANDARD = LVCMOS33 | SLEW = SLOW | DRIVE = 12;
NET "IN_SENS[6]" LOC = P24 | IOSTANDARD = LVCMOS33 | SLEW = SLOW | DRIVE = 12;
NET "IN_SENS[7]" LOC = P25 | IOSTANDARD = LVCMOS33 | SLEW = SLOW | DRIVE = 12;
NET "OUT_LED[0]" LOC = P46 | IOSTANDARD = LVCMOS33 | SLEW = SLOW | DRIVE = 12;
NET "OUT_LED[1]" LOC = P47 | IOSTANDARD = LVCMOS33 | SLEW = SLOW | DRIVE = 12;
NET "OUT_LED[2]" LOC = P48 | IOSTANDARD = LVCMOS33 | SLEW = SLOW | DRIVE = 12;
NET "OUT_LED[3]" LOC = P49 | IOSTANDARD = LVCMOS33 | SLEW = SLOW | DRIVE = 12;
NET "OUT_LED[4]" LOC = P50 | IOSTANDARD = LVCMOS33 | SLEW = SLOW | DRIVE = 12;
NET "OUT_LED[5]" LOC = P51 | IOSTANDARD = LVCMOS33 | SLEW = SLOW | DRIVE = 12;
NET "OUT_LED[6]" LOC = P54 | IOSTANDARD = LVCMOS33 | SLEW = SLOW | DRIVE = 12;
NET "OUT_LED[7]" LOC = P55 | IOSTANDARD = LVCMOS33 | SLEW = SLOW | DRIVE = 12;Photos du projet électronique
Une réponse sur « Projet électronique FPGA 4 #2/3 : Capteur de distance ultrasonique à base du FPGA & Arduino »
[…] PROJET ÉLECTRONIQUE FPGA 4 #2/3 : CAPTEUR DE DISTANCE ULTRASONIQUE À BASE DU FPGA & ARDUINO […]