

-
Cours 1 | Communications séries
-
Cours 2 | Wifi bases théoriques et pratiques
-
Cours 3 | Liaisons série asynchrones
-
Cours 4 | Introduction aux réseaux de communication
-
Cours 5 | Téléinformatique
-
Cours 6 | Communication les liaisons séries asynchrones
-
Cours 7 | Bus de terrain CAN (Controller Area Network)
-
Cours 8 | Protocoles de communication
-
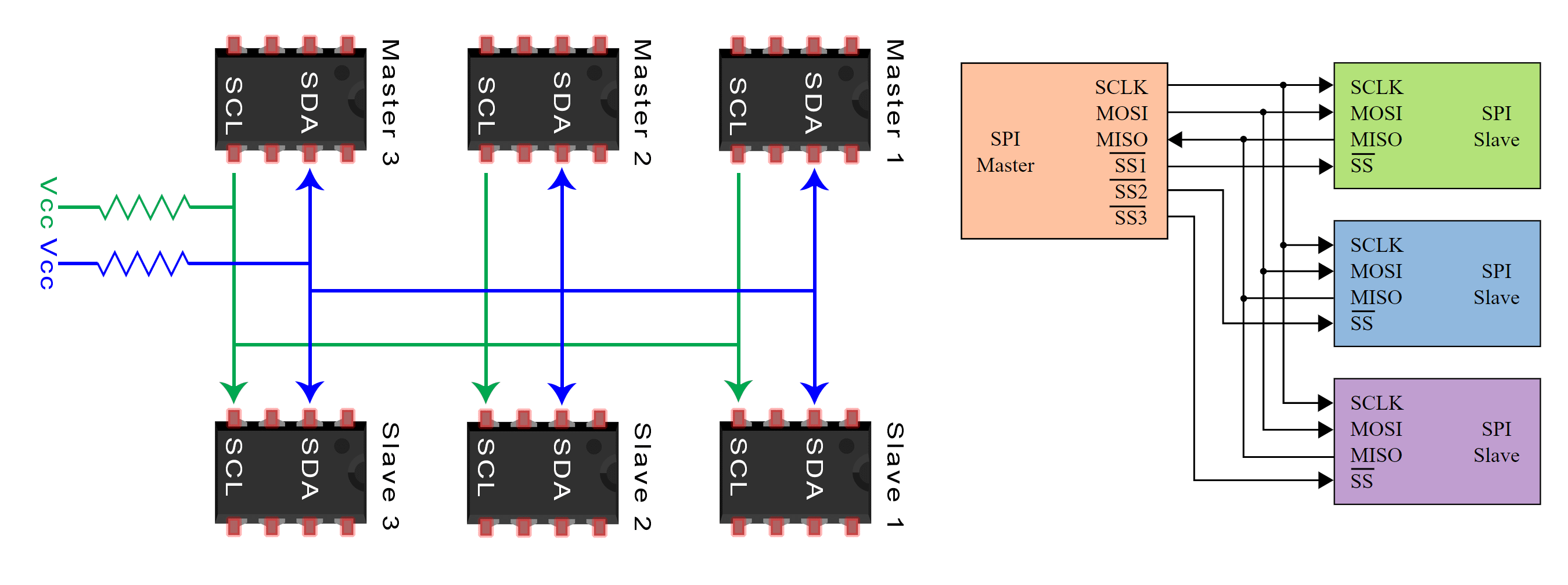
Cours 9 | Bus SPI
-
Cours 10 | Protocole Modbus
-
Cours 11 | Programmation d’une chaîne d’acquisition
-
Cours 12 | Architecture des systèmes informatiques – Communications
-
Cours 13 | Le port série et bus USB
-
Cours 14 | Réseaux de communications industrielles
-
Cours 15 | Réseaux industriels
-
Cours 16 | Communication sans fil du capteur jusqu’au réseau
-
Cours 17 | Banc de développement et de validation d’un système embarqué automobile
-
Cours 18 | Analyse de la robustesse et des améliorations potentielles du protocole RadioFréquences Sub-GHz KNX utilisé pour l’IoT domotique
-
Cours 19 | Etude d’un analyseur de protocole pour réseaux Bluetooth
-
Cours 20 | Cours Android Développement et API
-
Cours 21 | Bus I2C
-
Cours 22 | Architecture des systèmes embarqués
-
Cours 23 | Arduino : Applications distantes
-
Cours 24 | Réseaux de capteurs pour applications de suivi médical
-
Cours 25 | WIFI & BLUETOOTH
-
Cours 26 | Module de Cours Réseaux Locaux Industriels et Bus de Terrain
-
Cours 27 | Réseau de Communication et Télégestion
-
Cours 28 | Réseaux Locaux Industriels & Bus de Terrain
-
Cours 29 | Transmission de l’information : les liaisons
-
Cours 30 | Modbus Protocole de communication Série Modbus
-
Cours 31 | Bluetooth
-
Cours 32 | Etude du bus CAN
-
Cours 33 | Robotique et Systèmes Embarqués
-
Cours 34 | Introduction aux bus et réseaux temps réel
-
Cours 35 | Bus de communication
-
Cours 36 | Bus de communication
-
Cours 37 | Le bus CAN (Controller Area Network)
-
Cours 38 | Bus de communication
-
Cours 39 | Transmission série : le bus I2C
-
Cours 40 | Bus I2C Exemple de programme en C Pour µC de type PIC16F
-
Cours 41 | Le bus CAN
-
Cours 42 | Le réseau CAN et le protocole CAN Open
-
Cours 43 | Gestion de bus CAN
-
Cours 44 | Bus de terrain et réseaux industriels
-
Cours 45 | Les réseaux temps réel embarqués dans les véhicules
-
Cours 46 | La couche liaison
-
Cours 47 | Réseaux et BUS de terrain
-
Cours 48 | Transmission et Acquisition de Données
-
Cours 49 | Protocoles de communication dédiés
-
Cours 50 | Bus et modules I2C pour Arduino
-
Cours 51 | Réseaux Locaux Industriels et Bus de Terrain
-
Cours 52 | Le Bus I2C
-
Cours 53 | Introduction au Bus I2C
-
Cours 54 | BUS I2C
-
Cours 55 | Le bus I2C II
-
Cours 56 | Communications série RS232 – I2C
-
Cours 57 | Le BUS I2C Le protocole I2C APPLICATIONS
-
Cours 58 | Périphériques BUS UART, I2C et SPI
-
Cours 59 | Réseaux et informatique embarquée Bus terrains dans les microcontrôleurs
-
Cours 60 | Transmission Série
-
Cours 61 | LE BUS I2C III
-
Cours 62 | Réseau et communication Unix
-
Cours 63 | Structures des ordinateurs
-
Cours 64 | Bus I2C en mode Esclave MSP430
-
Cours 65 | Systèmes d’exploitation pour l’embarqué
-
Cours 66 | Systèmes temps-réel
-
Cours 67 | Réseaux et communications informatiques
-
Cours 68 | Informatique industrielle
-
Cours 69 | Test Automatique Bus Avionique Langage C
-
Cours 70 | Le Bus S.P.I
-
Cours 71 | TP ports de communication synchrones
-
Cours 72 | Projet SPI: Le Bus CAN
-
Cours 73 | Espionnage des bus de communication dans un système embarqué
-
Cours 74 | Mécatronique des véhicules automobiles – La norme AUTOSAR
-
Cours 75 | Introduction aux réseaux de contrôle/commande basés sur La Technologie LONWORKS
-
Cours 76 | La communication de l’information Réseaux et Bus
-
Cours 77 | Multiplexeur pour capteurs inductifs
-
Cours 78 | Modbus Protocole de communication Série Modbus
-
Cours 79 | Protocoles TCP – IP et Modbus-TCP Analyse de Trafic Ethernet – IP
-
Cours 80 | LE BUS I2C
-
Cours 81 | Cours de Réseaux
-
Cours 82 | Le bâtiment intelligent appliqué au handicap
-
Cours 83 | La liaison série RS232
-
Cours 84 | Etat de l’art des réseaux LPWA
-
Cours 85 | Réseaux 1
-
Cours 86 | Introduction aux réseaux
-
Cours 87 | Partie 2 Sécurité des Réseaux Locaux Informatiques VLAN et WLAN
-
Cours 88 | Support de cours RTEL
-
Cours 89 | INTRODUCTION AUX RÉSEAUX
-
Cours 90 | Transmission d’images sur les réseaux de capteurs sans fil sous la contrainte de l’énergie
-
Cours 91 | Réseaux
-
Cours 92 | LEXIQUE DE TERMES ET ACRONYMES RESEAUX & TELECOMMUNICATIONS
-
Cours 93 | Réseaux et télécoms L3/Info + Miage
-
Cours 94 | Rapport de Projet de Fin d’Etudes Combi Instrument CAN
-
Cours 95 | Structure des ordinateurs
-
Cours 96 | Wireless LAN : techniques RF, Wifi, Bluetooth
-
Cours 97 | Partie 5 : Réseaux Locaux
-
Cours 98 | Architectures et Protocoles des Réseaux Chapitre 6 – Les réseaux sans fils
-
Cours 99 |Bluetooth : technologie et potentiel industriel
-
Cours 100 | Réseaux Locaux Industriels & Bus de Terrain
-
Cours 101 | Familles MAC & SIMPA Note d’application Liaison calculateur : protocoles et syntaxe
-
Cours 102 | Réseau EISTI
-
Cours 103 | Cours Réseaux PARTIE I Modèles de Réseaux et Couches Basses
-
Cours 104 | Communication série avec 2 PC avec NULL-MODEM
-
Cours 105 | Gestion du port série ( COM) sous Windows
-
Cours 106 | HAL et communication série
-
Cours 107 | Ports série RS232 et I2C
-
Cours 108 | Problématique des systèmes temps réel LPSIL Option Informatique Embarquée et Réseaux sans Fil
-
Cours 109 | Réalisation d’une maquette de test permettant de simuler du diagnostic véhicule via le protocole ISO 14229 (UDS)
-
Cours 110 | TP INFORMATIQUE INDUSTRIELLE MP13 : LE BUS CAN
-
Cours 111 | TP BUS CAN ARDUINO
-
Cours 112 | Réseaux et informatique embarquée 3. Bus terrain
-
Cours 113 | Réseaux de terrain : 3 partie
-
Cours 114 | Programmation des asservissements et de la communication CAN sur le Cycab
-
Cours 115 | Le réseau CAN (Controller Area Network)
-
Cours 116 | Bus CAN
-
Cours 117 | Introduction au réseau CAN
-
Cours 118 | TP1 : Bus CAN (Contoller Area Network)
-
Cours 119 | Introduction aux Protocoles de communication : Le bus CAN (control Area Network)