Objectifs de la vidéo
- Savoir à quoi sert le contrôleur de vol KK Multicopter
- Savoir les caractéristiques techniques de la carte
- Savoir l’utilité des capteurs dans la carte
- Savoir le nombre des moteurs qu’on peut contrôler avec la carte
- Connaitre la version du µC de la carte
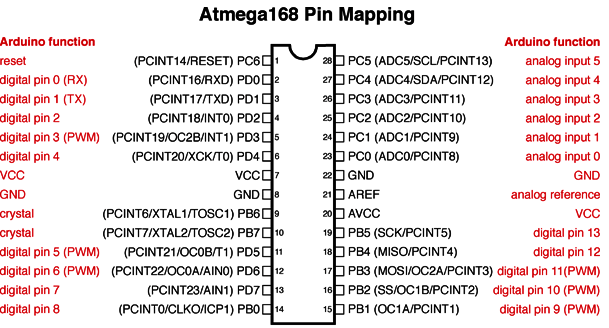
- Connaitre le mapping des pins du µC
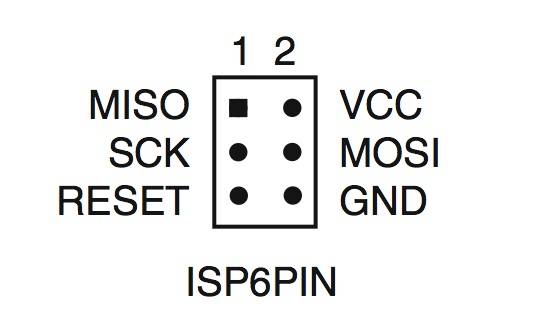
- Connaitre les pins du port ISP
- Etc.
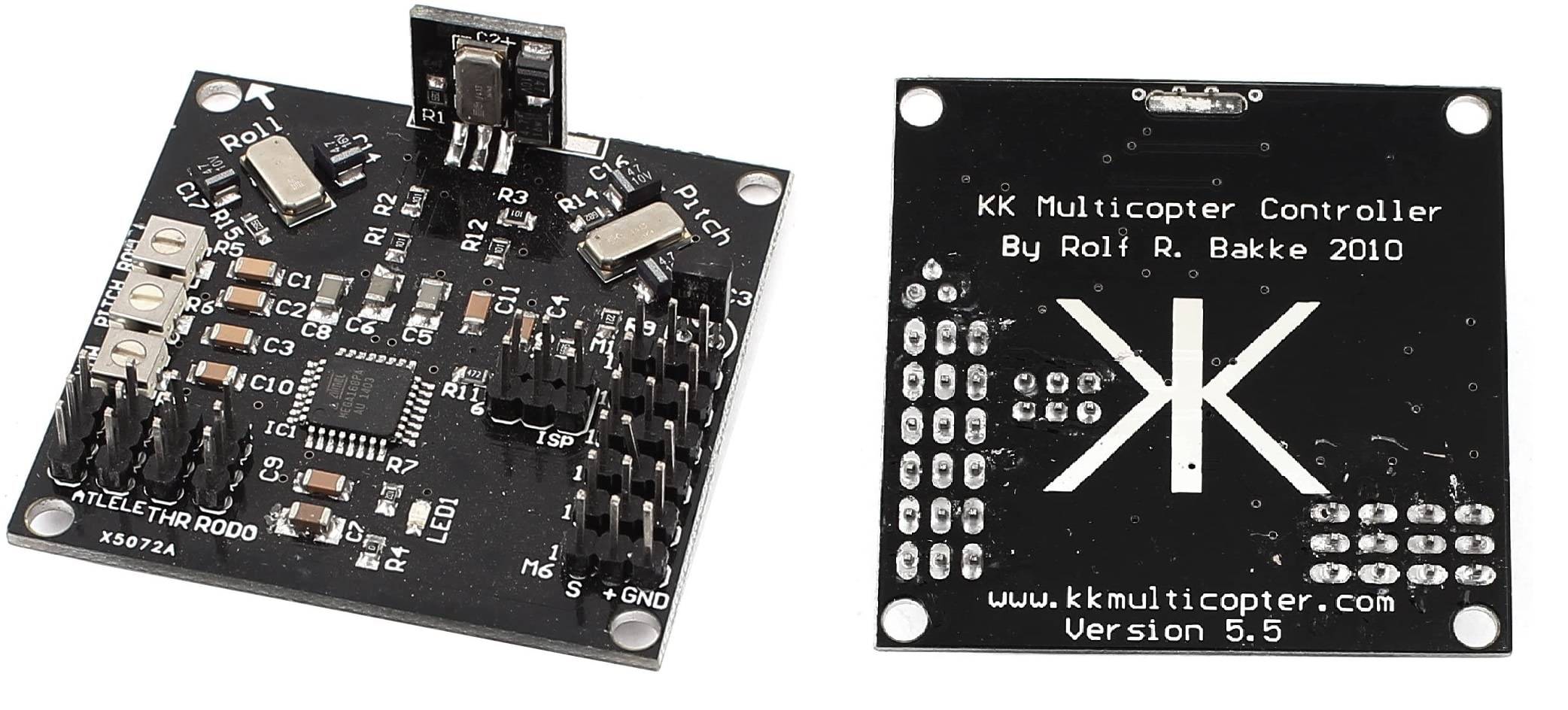
Fonctionnement de la carte
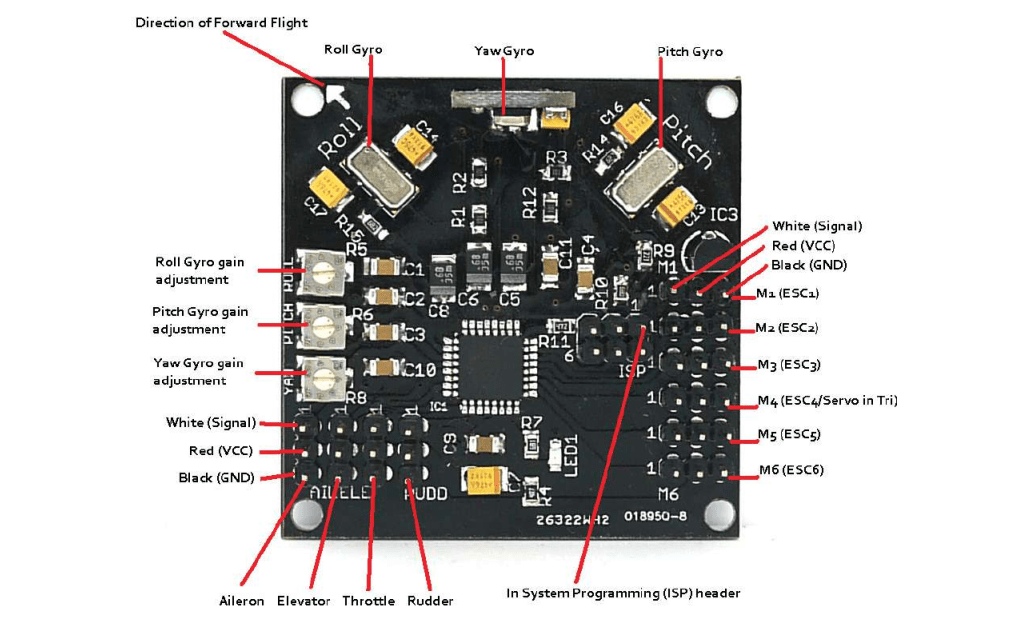
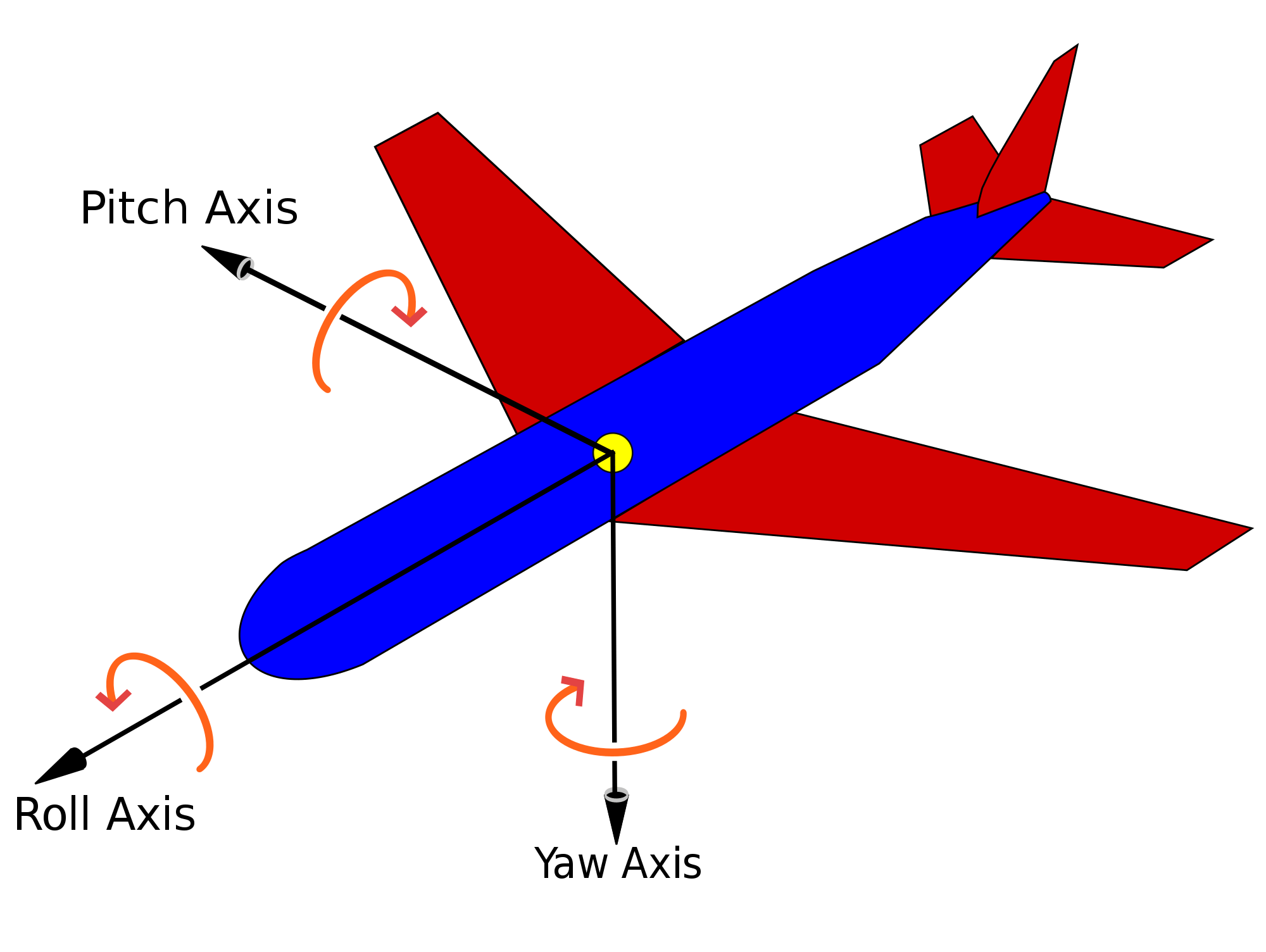
Le KK Multicopter est une carte de contrôle de vol pour les multicoptères télécommandés avec 2,3,4 et moteurs. Son but est le contrôle et la stabilisation du drone pendant le vol. Pour ce faire, il prend le signal des trois gyroscopes intégrés dans la carte (roulis, tangage et lacet)(Roll, Pitch, Yaw) par l’intermédiaire du microcontrôleur Atmega 168 (Comme celui utilisé par la carte Arduino Mini). Celui-ci traite ensuite les informations selon le logiciel KK et envoie un signal de commande aux contrôleurs de vitesse électroniques (ESC) qui sont branchés sur la carte et également connecté aux moteurs. En fonction du signal du µC, les ESC accéléreront ou ralentir les moteurs afin de stabiliser le drone ainsi effectuer les commandes désirées par l’utilisateur.
La carte peut être contrôlée par une télécommande (RX) en utilisant un récepteur via les pins goupilles d’aileron, de profondeur, d’accélérateur et de gouvernail de direction sur la carte. Après avoir traité ces informations, le µC enverra alors un signal aux moteurs (via les broches M1 à M6 sur la carte) pour accélérer ou ralentir pour obtenir un vol contrôlé (haut, bas, arrière, avant, gauche, droite, lacet) sur le commande du pilote RC envoyée via son émetteur (TX). La carte est muni d’un port ISP pour programmer le µC.
Les axes Yaw Pitch et Roll
Mapping des pins de la carte Arduino Mini
Pinout du Port ISP