Objectifs
- Savoir l’utilité d’un actionnaire linéaire
- Savoir les caractéristiques d’un actionnaire linéaire
- Savoir le fonctionnement d’un actionnaire linéaire
- Savoir commander un actionnaire linéaire
- Etc.
Applications
- Déplacement linéaire d’une charge, pièce
- Systèmes de translation : Portière, fenêtre, tables mobiles, etc.
- Procédés avec mouvement de translation précis
- Automatismes industriels
- Et, d’autres applications !
Principe de fonctionnement

Un actionneur linéaire électrique est similaire à un vérin électrique. Il permet d’assurer un mouvement de translation dans les deux sens. Il est généralement constitué d’un moteur à courant continue (DC), d’un réducteur et arbre visé comme indiqué dans la figure. Par conséquent, les caractéristiques de l’actionneur vont dépendre de celles du moteur-réducteur, ainsi la longueur de l’arbre. Ci-dessous une liste non exhaustive des principaux critères du choix d’un actionneur linéaire :
- Type & Tension d’alimentation 12/24/48, etc.
- Type du moteur (à CC, pas à pas, servomoteur,
- Courant maximal (pour une charge maximale)
- Courant à vide (sans charge)
- Vitesse maximale du déplacement, souvent en mm/s
- Type de l’entraînement (vissage, courroie, miniature, etc.)
- Poids maximal en (N), environ un rapport 10 par rapport à la charge en Kg
- Plage du mouvement ou la longueur effective de l’arbre en pleine échelle (minimale & maximale)
- Indice de protection (étanchéité)
- Température de fonctionnement
- Type de la commande
- Etc.
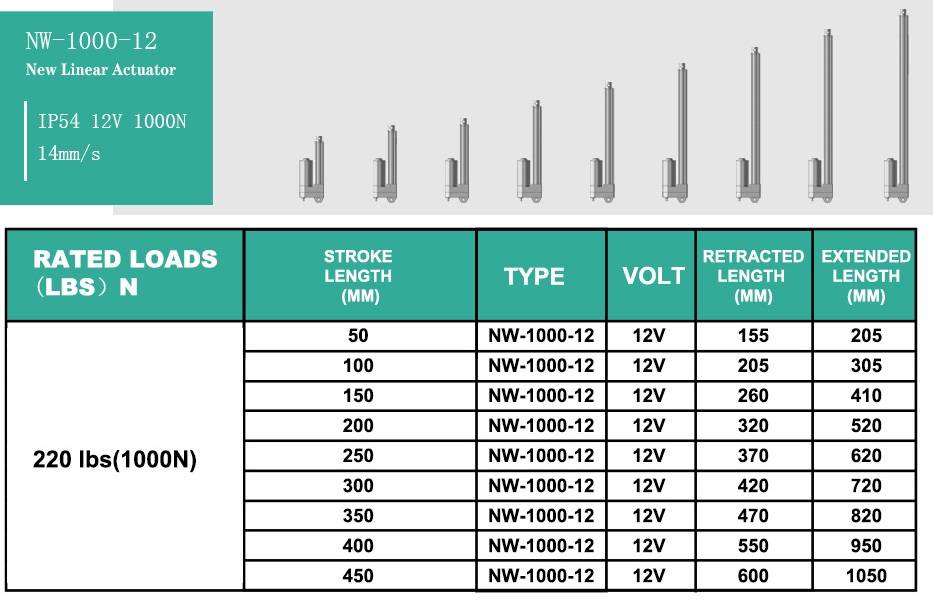
Ci-dessous un exemple typique d’un actionnaire linéaire électrique NW-1000-12
On verra prochainement la partie commande. N’oublie pas de laisser un commentaire, ça nous encourage pour continuer à partager des projets 🙂