Objectif
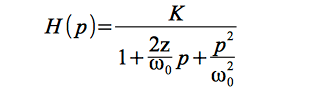
L’objectif du tuto est la discrétisation de la fonction du transfert H(p) ou H(s) d’un système du second ordre. Dans un premier temps on va écrire la sortie Y(p) en fonction de H et l’entrée X(y) : Y(p)= H(p)*X(p). Ensuite effectuer la transformée de Laplace inverse, suivie par l’approximation de la dérivée première et la dérivée seconde pour obtenir y(n) (voir la vidéo pour plus des détails.
Le tuto prochain sera dédié à l’implémentation sur Arduino et analyse de la réponse indicielle du système.
Accueil Asservissement avec Arduino