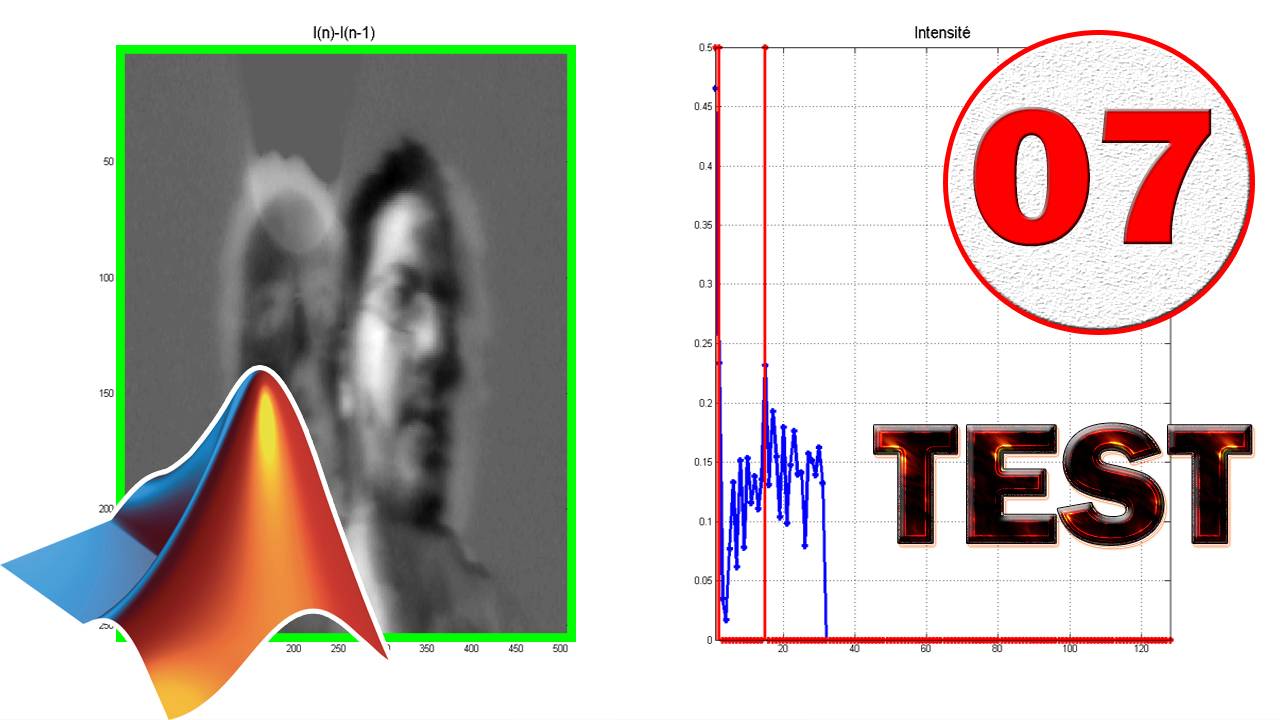
Objectifs Savoir activer la caméra de son PC Savoir récupérer une image de la caméra Savoir détecter les mouvements dans une image Savoir définir un opérateur de détection Etc. Ci-dessous le code commenté du projet. Voir le tutoriel pour plus de détails Activation de la Caméra Paramètres du programme Boucle principale : Détection & Affichage Programme […]