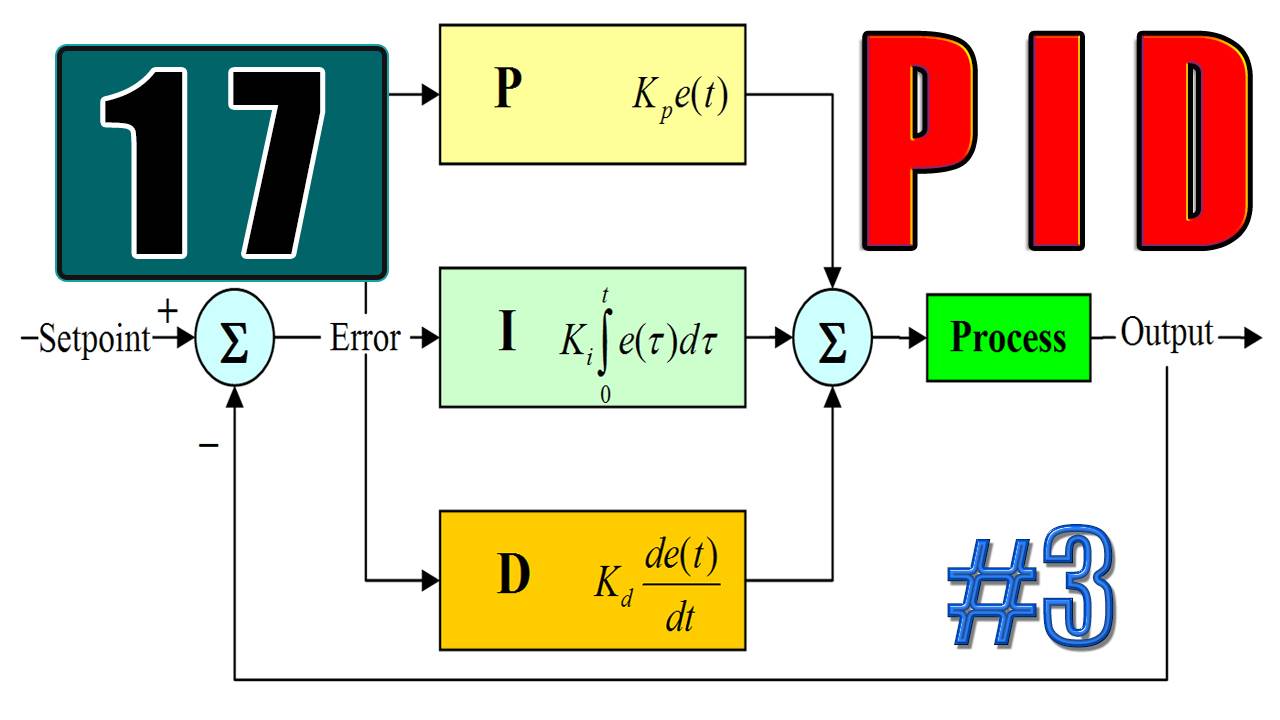
Objectifs Savoir Implémenter un correcteur PID Numérique (Modèle du 2nd Ordre) Savoir régler les paramètres de son correcteur Savoir optimiser les performances de son correcteur Arduino & Problème de la Saturation (Divergence) Etc. Fonctionnement Le tuto a pour objectif d’implémenter et régler efficacement les paramètres d’un correcteur PID numérique réel. Contrairement à un PID […]