Savoir changer le sens de rotation d’un moteur PAP
Comprendre le principe de fonctionnement de la commande IR
Etc.
L’objectif du tuto est de valider le fonctionnement du moteur pas à pas. Il sera utilisé pour le contrôle du déplacement du curseur vers la droite ou la gauche. Voir le tuto pour les détails techniques.
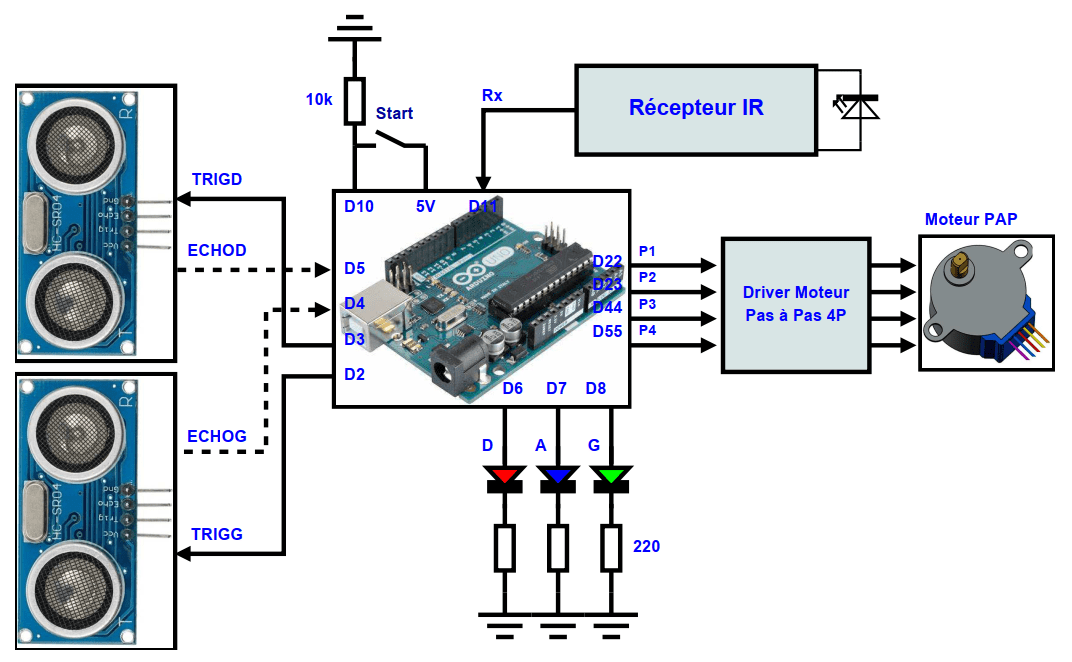
Schéma synoptique
Programme Arduino
void setup() { // Affichage Serial.begin(115200);
// Init Moteur PAP - PINS[22-25] DDRA=0xff; PORTA=0x00; }
void loop() { // Test Moteur PAP (PORTA) setMPAP(NULL, 0, 2, 100); delay(1000); setMPAP(NULL, 1, 2, 100); delay(1000); }
void setMPAP(int *pin_4p, int sens, unsigned long delay_ms, unsigned long n_hstep) { const int n_ustep=9; // 8+1 const unsigned short seqMPAP_p[n_ustep]= {1,3,2,6,4,12,8,9,0}; const unsigned short seqMPAP_m[n_ustep]= {9,8,12,4,6,2,3,1,0};