VIDEO
Objectifs
Savoir faire la commande multimodes d’un automate
Savoir utiliser le module IR
Test des capteurs à ultrasons
Savoir mesurer la distance avec un capteur à US
Savoir lire le code d’une télécommande IR
Savoir commander un moteur pas à pas
Savoir changer la vitesse d’un moteur PAP
Savoir changer le sens de rotation d’un moteur PAP
Comprendre le principe de fonctionnement de la commande IR
Etc.
L’objectif du tuto est de valider le fonctionnement du système complet. Voir le tuto pour les détails techniques.
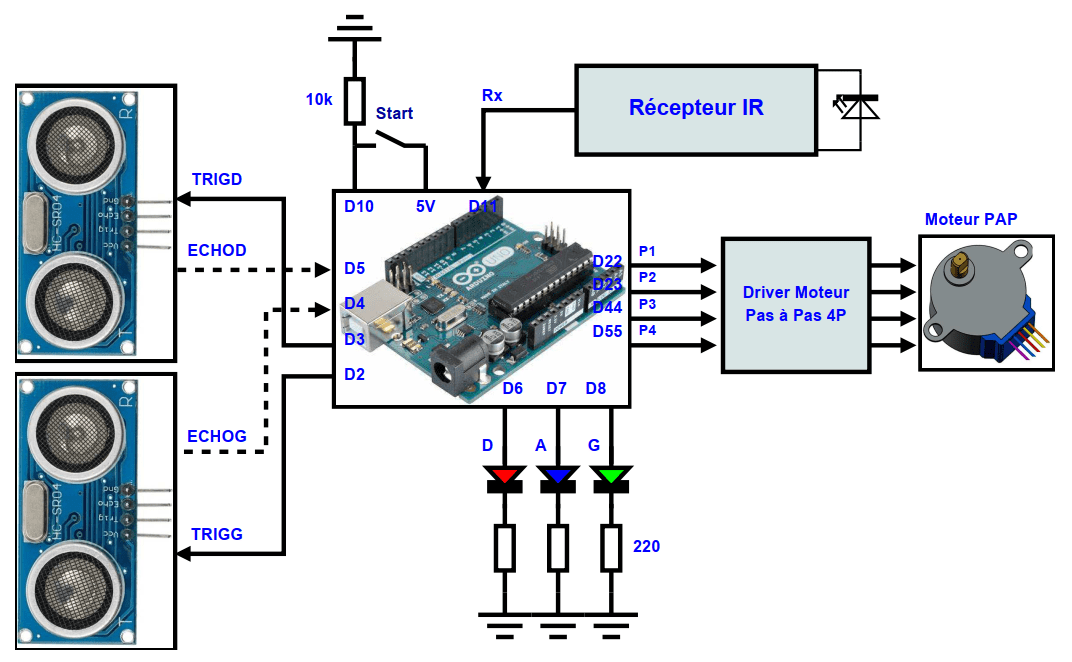
Schéma synoptique
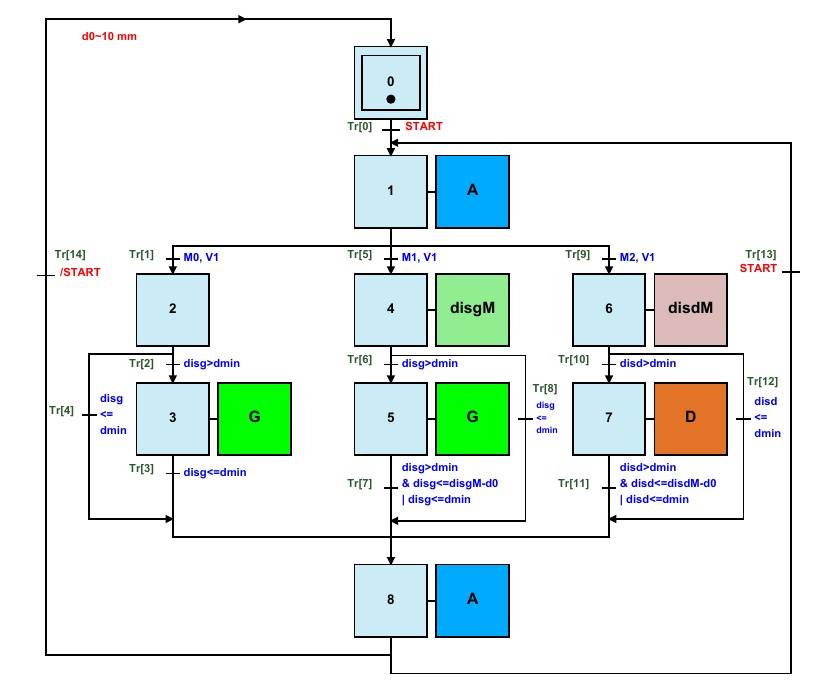
Grafcet du Système
Extrait du Code Arduino
Le code complet sera disponible à la fin de la série.
#include "IRremote.h"
Obtenir le livre « Codage en C du GRAFCET avec ARDUINO