Projets Matlab & Microcontrôleur #8: Machine de tri Automatique par couleurs
Objectifs
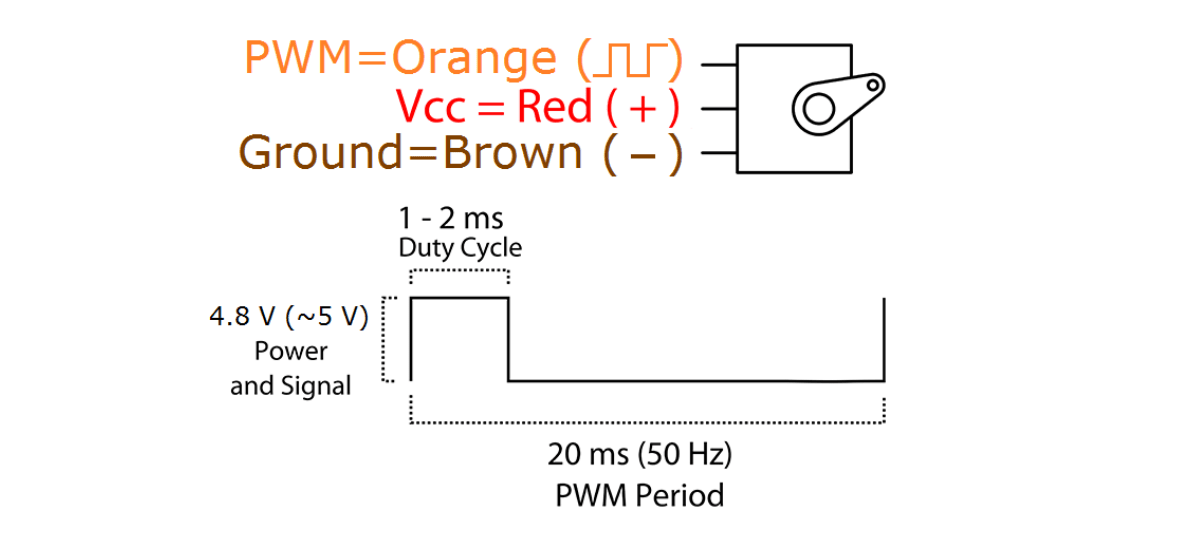
Savoir contrôler un servomoteur avec Matlab
Savoir établir la liaison série entre Matlab & Arduino
Savoir comment détecter une couleur dans une image
Savoir utiliser un seuil optimal d’une image
Savoir utiliser quelques fonctions de morphologie mathématique
Et autres astuces.
Vidéo démonstration
Fonctionnement
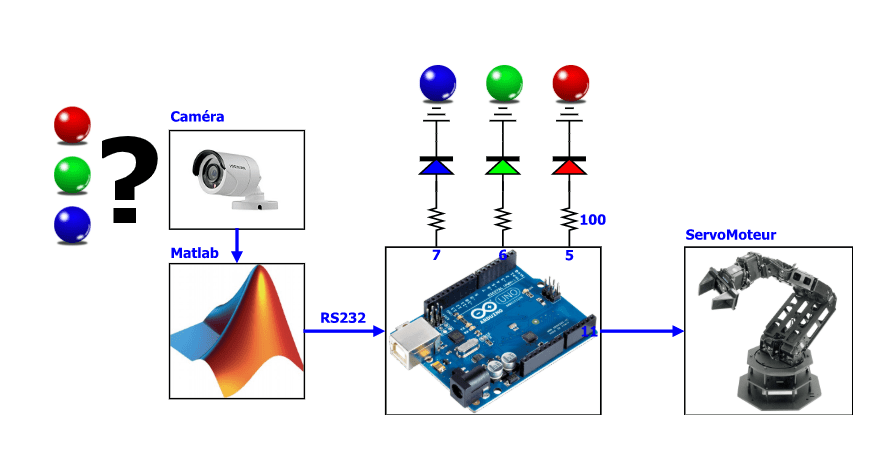
Le projet dans sa globalité permet de trier des objets en fonction de leurs couleurs. Par exemple le tri des balles, pièces, etc. C’est un système détection et poursuite d’objets basés sur la détection des couleurs. Il est constitué par les éléments suivants :
Caméra : comme tout système de vision, une caméra est un capteur d’image. Elle fournit l’image de la scène. On utilisera la caméra de l’ordinateur.
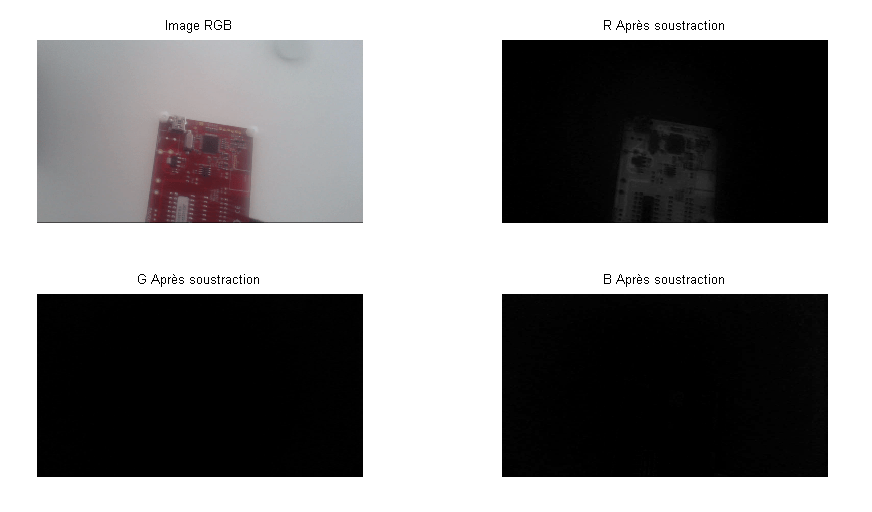
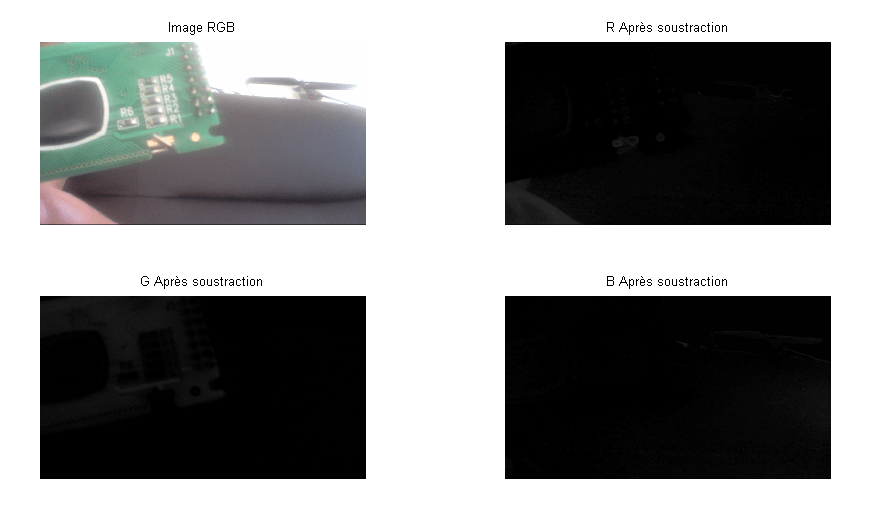
Matlab : Son rôle est la récupération des images de la caméra, traitement et analyse d’images. Il coconnait et traque l’une ou plusieurs des trois composantes d’une image (Red (R), Green (G) et Bleu (B)). Le programme filtre l’ensemble de l’information dans l’image et préserve uniquement les couleurs cibles. Par exemple si on montre une balle rouge avec sa main, alors la zone de la balle sera détectée (la main et le reste de la scène sera filtrés et remplacés par une zone noire (pixels nuls)). Si on montre deux balles rouge et bleu, le programme indique la présence des deux couleurs, ou trois balles, etc.
La lecture de la caméra se fait en boucle ainsi que l’ensemble des traitements. Lorsqu’une couleur est détectée, l’information est envoyée à la carte Arduino via la liaison série. La valeur envoyée indique le nombre des composantes détectées. En effet, avec trois composantes on peut avoir 8 combinaisons possibles : 000-111 ou de 0 à 7.
Carte Aduino : Elle récupère la donnée envoyée par le logiciel Matlab comprise entre 0 et 7 et la transforme en commande.
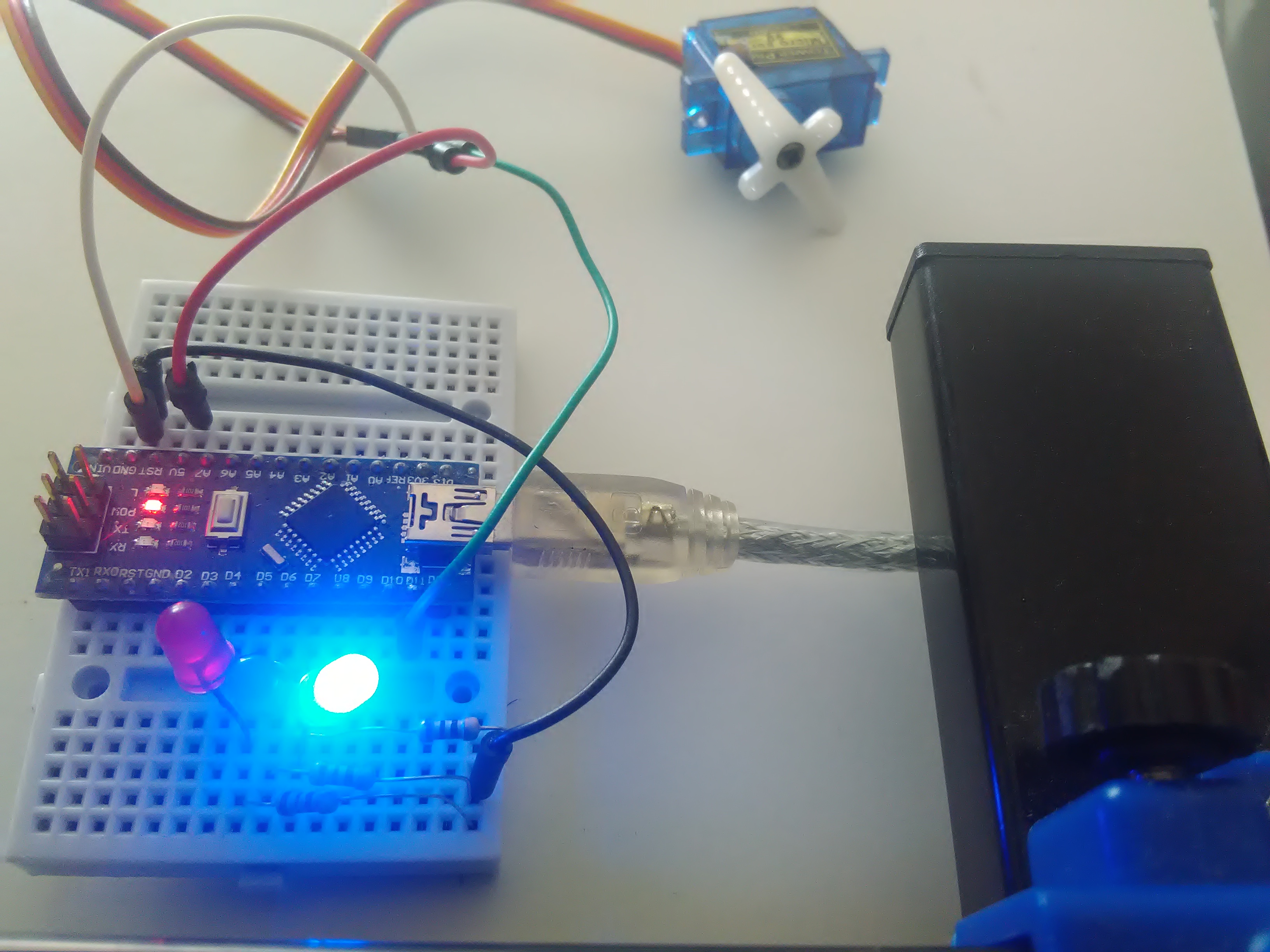
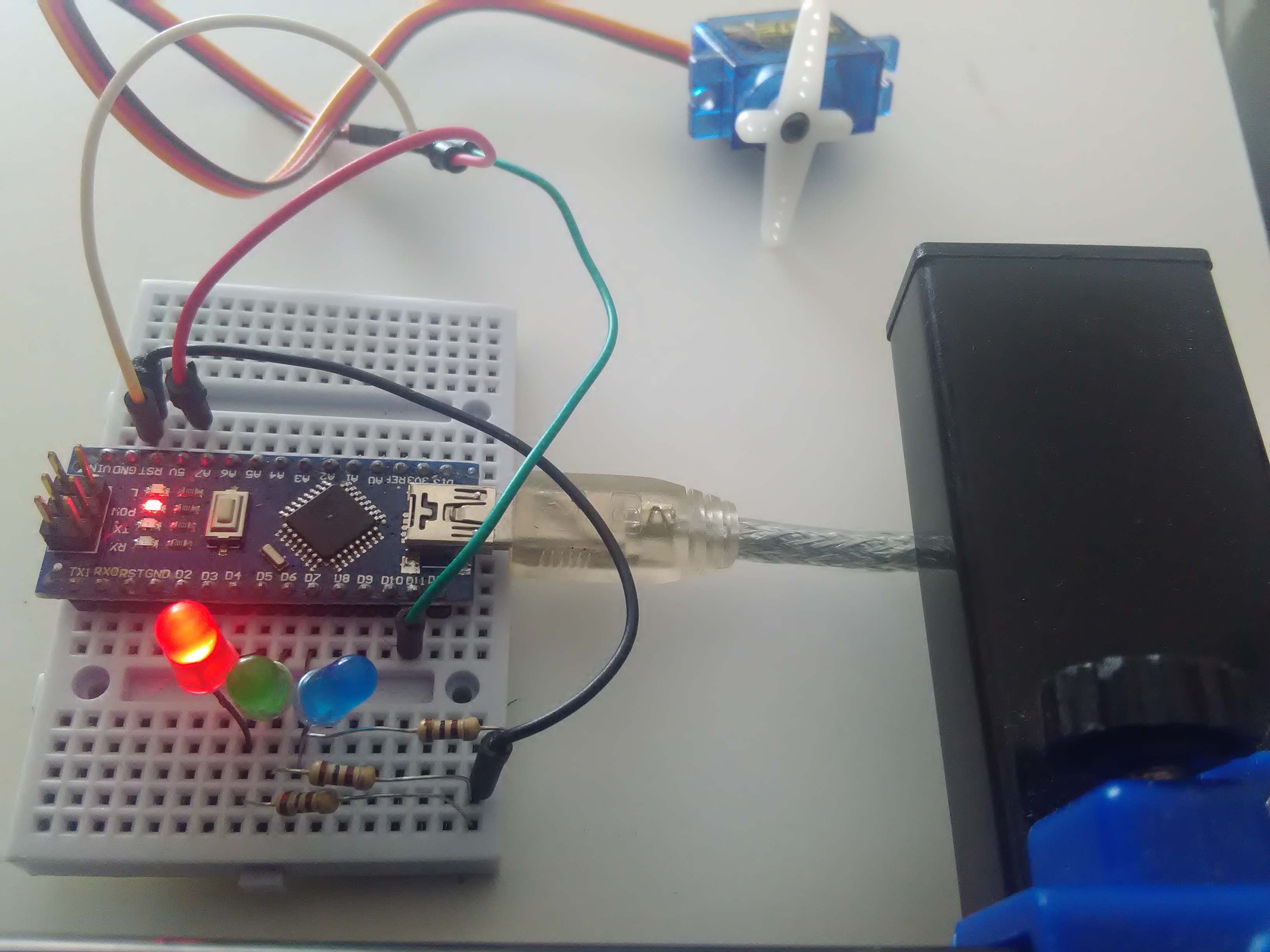
Les LEDs : les trois LED rouge, vert et bleu s’activent lorsqu’une une ou plusieurs composante couleur est détectée. En effet, on duplique les valeurs acquises (0-7) sur les LED. Exemples :
Valeur =(0) 000 : Trois LEDs éteintes
Valeur =(1)001 : LED rouge allumée, détection de la composante rouge uniquement
Valeur =(2)010 : LED bleu allumée, détection de la composante bleu uniquement
…
Valeur =(7)111 : Trois LEDs Allumé (détection de trois balles)
Servomoteur : le servomoteur est un simulateur d’un système de tri des pièces. On imagine l’arrivée des pièces dans un tapis roulant, un système d’aguillage à base du servomoteur se trouve à l’extrémité du tapis. Il dirige les pièces dans trois boîtes : la première pour les pièces rouges, la deuxième pour les rouges et la dernière pour les bleus. En effet, dans ce cas on ne peut détecter que l’une des trois couleurs (001 (1) ou 010 (2) ou 100(4)). Les autres combinaisons sont ignorées par le programme (voir la suite pour plus des détails).
Projets indispensables pour la compréhension de le suite
BauValue=115200; % Vitesse NumBits=8; % Nombre de bits
% Création d'un objet Serial Port SerialCOM = serial('COM3','BaudRate',BauValue,'DataBits', NumBits, 'Parity', 'none'); SerialCOM.Terminator = 'LF'; set(SerialCOM, 'Timeout',2);
Seuil_min=50; % Seuil minimal fixe ( Problème du à l'absence de la couleur cible) im_bw=im2bw(im_r,seuil_r);im_bw1=im_bw & (im_r >Seuil_min); se=strel('disk',10); im_out_r=imclose(im_bw1,se);
... % Nombre des pixels de la couleur R, G, B taille_r=length(find(im_out_r(:)==1)); taille_g=length(find(im_out_g(:)==1)); taille_b=length(find(im_out_b(:)==1));
% Activation de la LED par le nombre de pixels Seuil_detec=100; LED_r=double(taille_r>Seuil_detec); LED_g=double(taille_g>Seuil_detec); LED_b=double(taille_b>Seuil_detec); LED=[LED_r LED_g LED_b]; ...
Conversion et transmission de la valeur à la carte Arduino
% Obtenir l'image actuelle imm=getsnapshot(vid); im_rgb=imresize(imm,0.5); % Réduction de 50%
% Récupérer les composantes R, G et B im_gray=rgb2gray(im_rgb); im_R=im_rgb(:,:,1);im_r=imsubtract(im_R,im_gray); im_G=im_rgb(:,:,2);im_g=imsubtract(im_G,im_gray); im_B=im_rgb(:,:,3);im_b=imsubtract(im_B,im_gray);
% subplot(221); imshow(im_rgb); title('Image RGB'); % subplot(222); imshow(im_r); title('R Après soustraction'); % subplot(223); imshow(im_g); title('G Après soustraction'); % subplot(224); imshow(im_b); title('B Après soustraction');
Seuil_min=50; % Seuil minimal fixe ( Problème du à l'absence de la couleur cible) im_bw=im2bw(im_r,seuil_r);im_bw1=im_bw & (im_r >Seuil_min); se=strel('disk',10); im_out_r=imclose(im_bw1,se);
% Nombre des pixels de la couleur R, G, B taille_r=length(find(im_out_r(:)==1)); taille_g=length(find(im_out_g(:)==1)); taille_b=length(find(im_out_b(:)==1));
% Activation de la LED par le nombre de pixels Seuil_detec=100; LED_r=double(taille_r>Seuil_detec); LED_g=double(taille_g>Seuil_detec); LED_b=double(taille_b>Seuil_detec); LED=[LED_r LED_g LED_b];