Objectifs
- Savoir les caractéristiques du capteur ultrason HC-SR04
- Savoir mesurer la distance avec le capteur ultrason
- Savoir varier la fréquence de la luminosité des LED en fonction de la distance
- Savoir calculer filtrer un signal avec le filtre moyenneur
- Savoir créer et utiliser des nouvelles fonctions
- Etc.
Vidéo démonstration
Principe de fonctionnement
Le mini-projet est un radar de recul utilisé par les voitures. Il permet d’indiquer au conducteur qu’il s’approche d’un obstacle (mur de son garage, une autre voiture, etc.). L’indicateur de proximité peut être une sonnerie ou par l’intermédiaire des LEDs (trois LEDs rouge, vert et bleue qui s’allument au même temps). Ici nous varions la fréquence de luminosité en fonction de la distance : lorsqu’un objet s’approche du capteur, les LEDs clignotent rapidement (fréquence haute). Les LEDs clignotent plus lentement lorsque l’objet s’éloigne du capteur. Dans le présent projet, nous fixons la distance maximale à 50 cm (500 mm). Autrement dit lorsque la distance est supérieure à 50 cm, les LED s’arrêtent de clignoter. Elles commencent à s’allumer à partir des 50 cm. Le projet est constitué principalement d’un capteur à ultrasons HC-SR04, trois LED et une carte Arduino. Capteur à ultrason HC-SR04
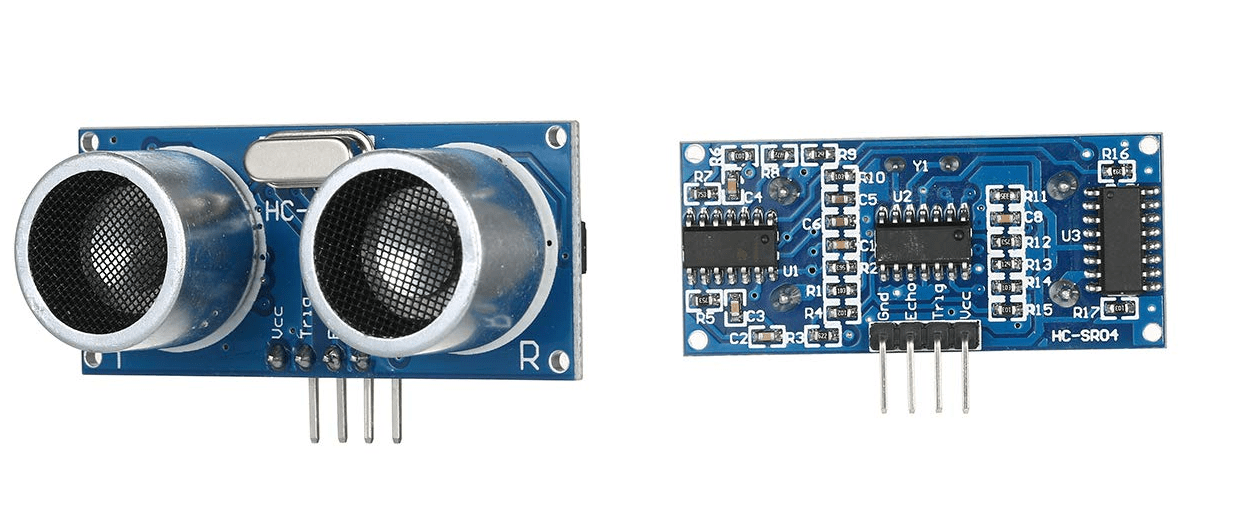
Voir le projet Sèche-mains ultrason avec Arduino pour plus des détails
Câblage des composants
- Signal TRIG: Pin 3
- Signal ECHO: Pin 2
- LED Rouge: 5
- LED Vert : 6
- LED bleu: 7
Comment mesurer la distance ?
La carte Arduino envoie une impulsion d’une durée égale à 10µs dans le pin TRIG. L’impulsion génère une onde ultrason par l’émetteur ultrason. Le récepteur écoute le retour de l’onde ou l’écho via le pin ECHO. La durée de l’impulsion de retour est proportionnelle à la distance allée +retour du signal ultrason et la distance de propagation d’une onde ultrason (voir la formule dans la fonction ci-dessous et le projet sèche main ultrason). Par conséquent, on peut déduire la distance entre l’émetteur et l’objet. Il faut bien noter que le capteur renvoie une valeur nulle lorsque l’objet est très proche ou trop loin (absence de l’objet). La fonction GetDisCM() renvoie la distance en mm.
Comment faire clignoter une LED en fonction de la distance ?
La zone utile pour le capteur est fixée à 500 mm (50 cm). Lorsque la distance > 50 cm, on positionne à zéro les trois LED. Lorsque la distance =50 cm, a varié la luminosité en fonction de la distance. L’astuce utilisée consiste à utiliser la fonction delay() qui varier avec la distance. L’exemple ci-dessous montre comment clignoter une LED avec une fréquence égale à 100 hz (période 10 ms).
Nous constatons que la fonction delay() prend en entrée par uniquement une constante, mais aussi une variable ! cette particularité permet de faire varier le temps d’attente en fonction de la distance. Il suffit d’utiliser la distance comme argument d’entrée de la fonction : delay(Distance) de la façon suivante :
La fonction SetLED() positionne les LED en fonction de la distance. La fonction tiens en compte également la limitation de 50 cm de la distance. Elle ignore aussi les valeurs nulles induites par l’absence de l’objet ou la présence d’un objet plus proche.
Comment calculer la valeur moyenne ?
La fonction GetMean() permet de renvoyer la valeur moyenne de la distance. La taille du filtre moyenneur est variable (lorsque la taille augmente, le temps de réponse augmente, la précision augmente). Consultez le projet Traceur série avec Arduino pour en savoir plus.
Programme principale
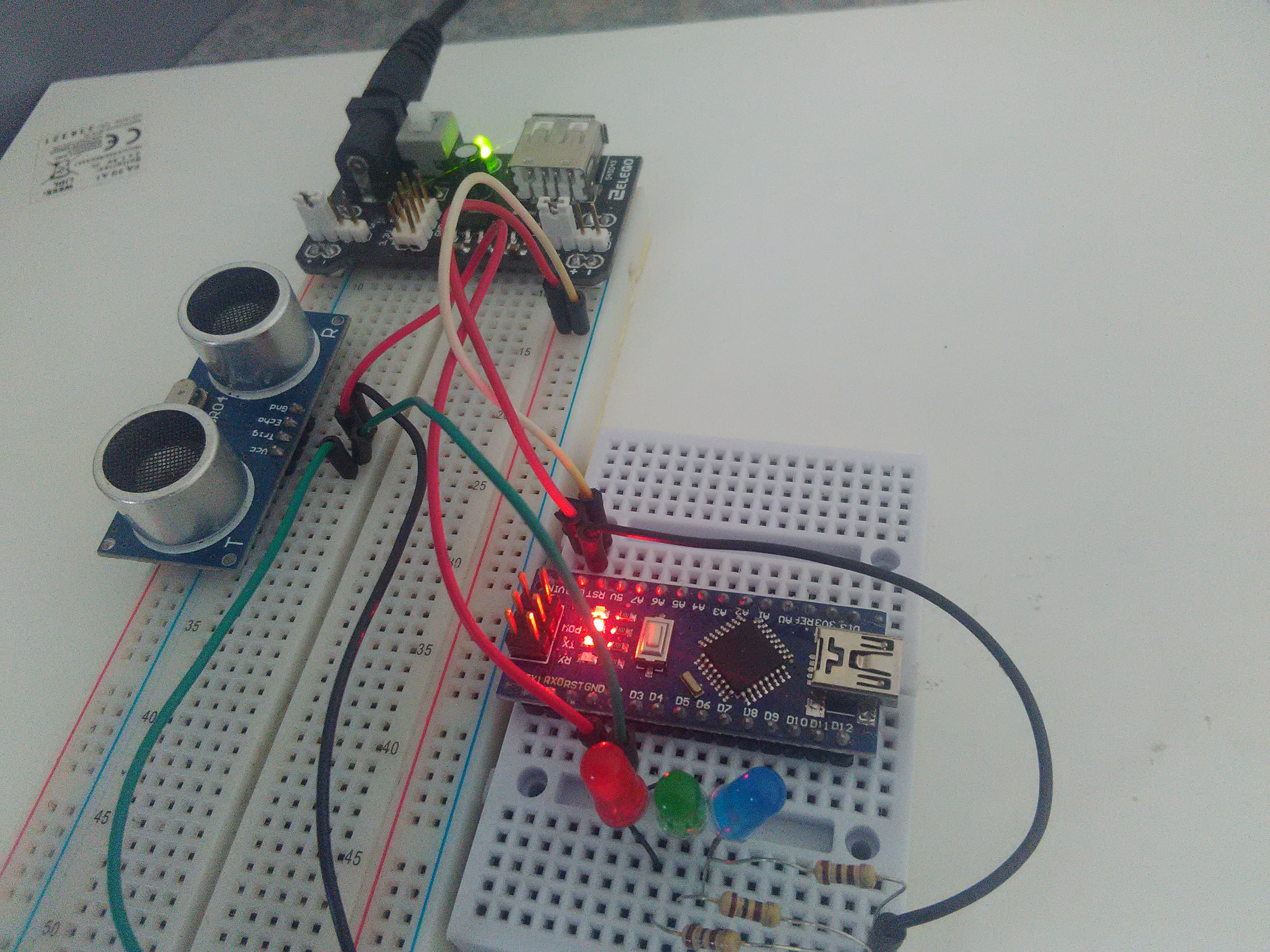
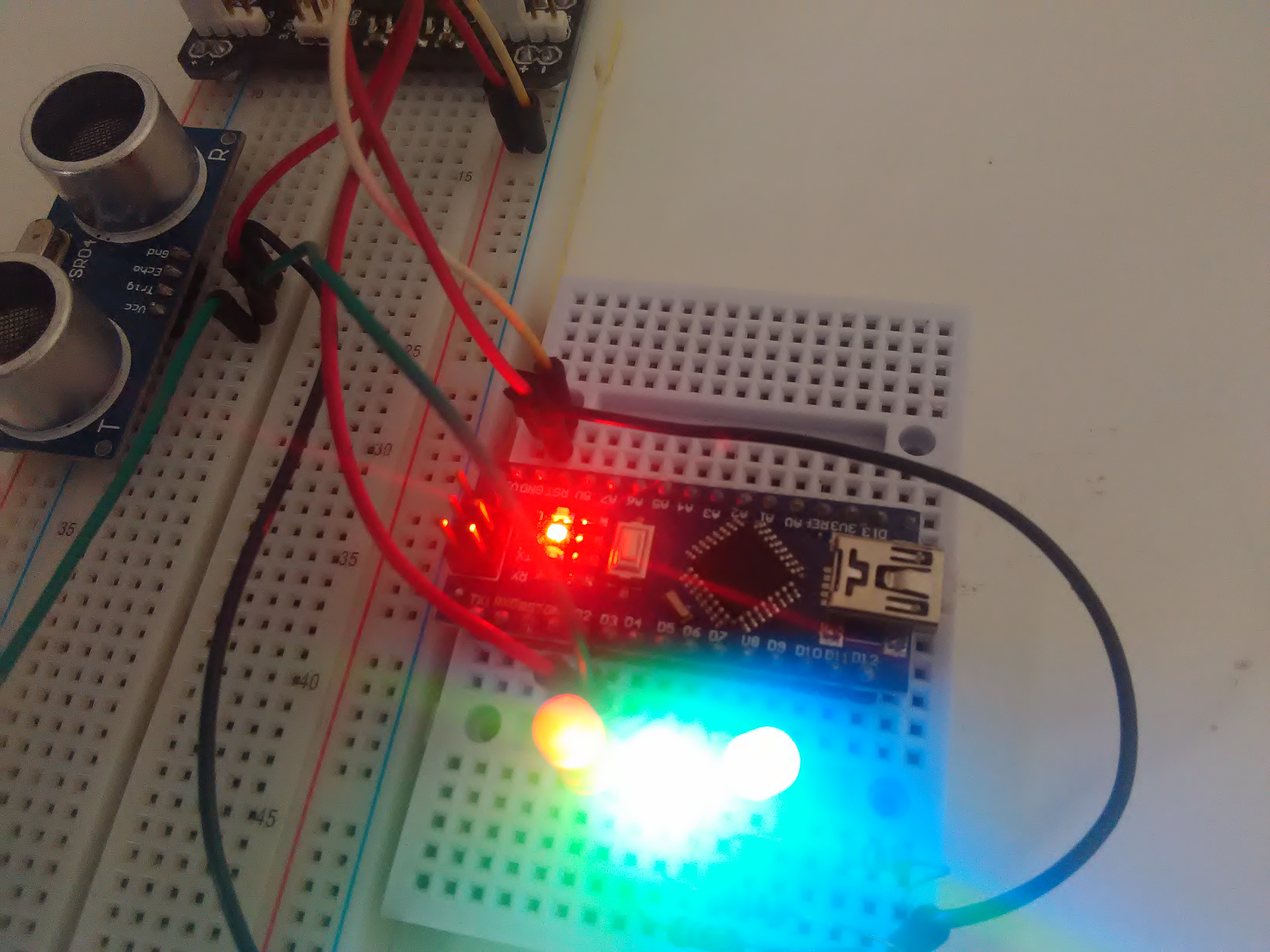
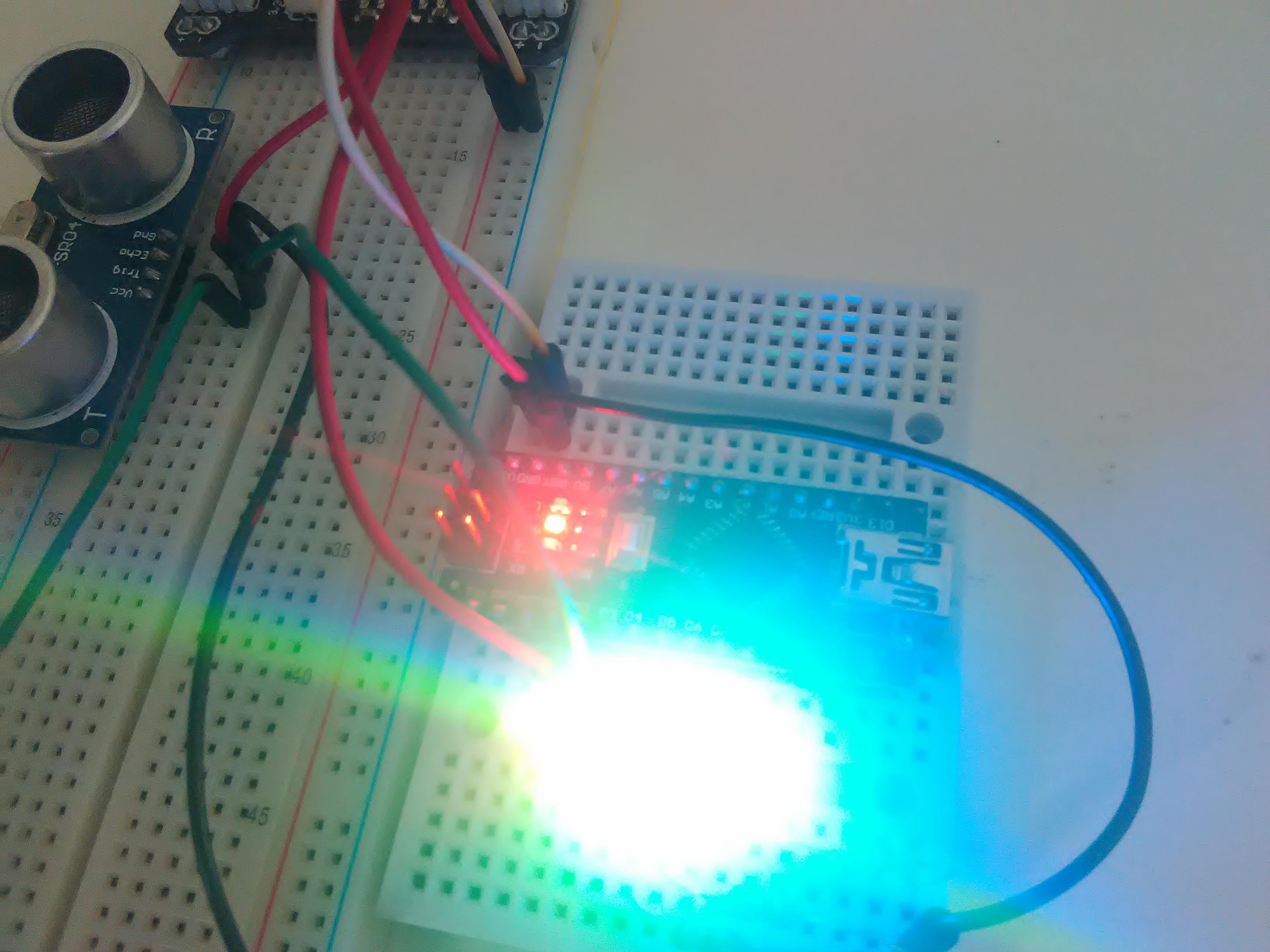
Photos du projet