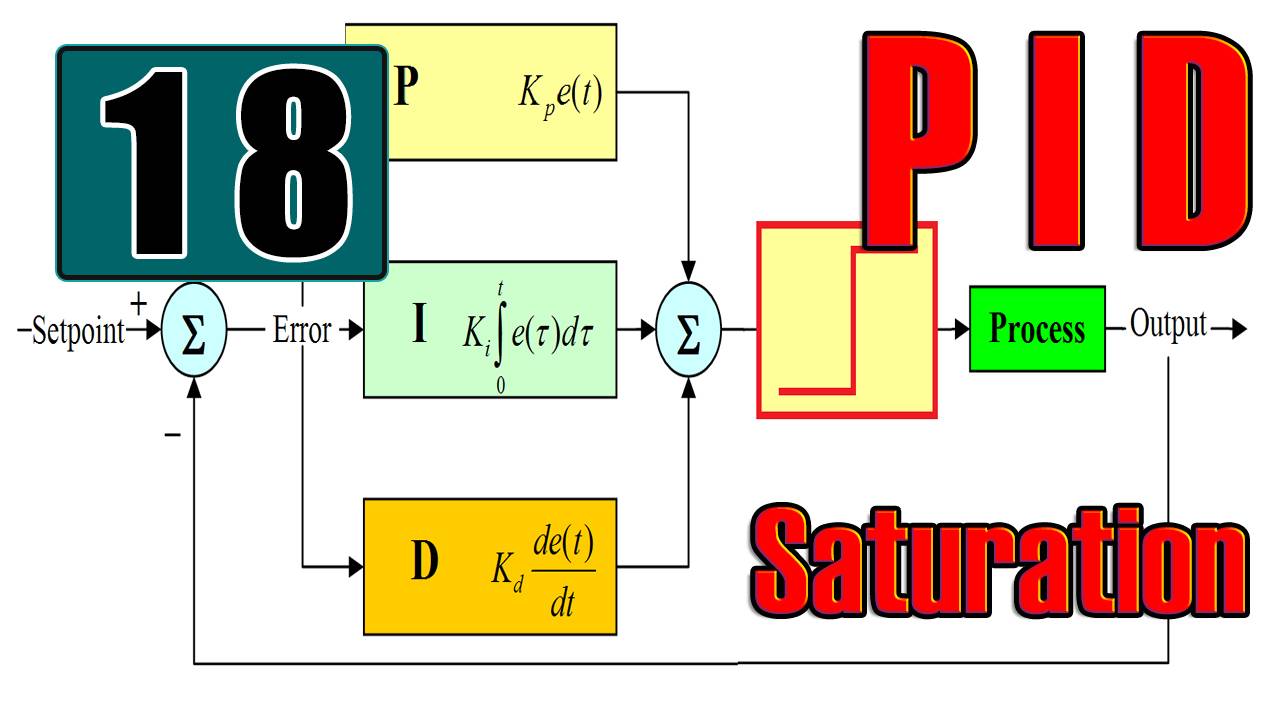
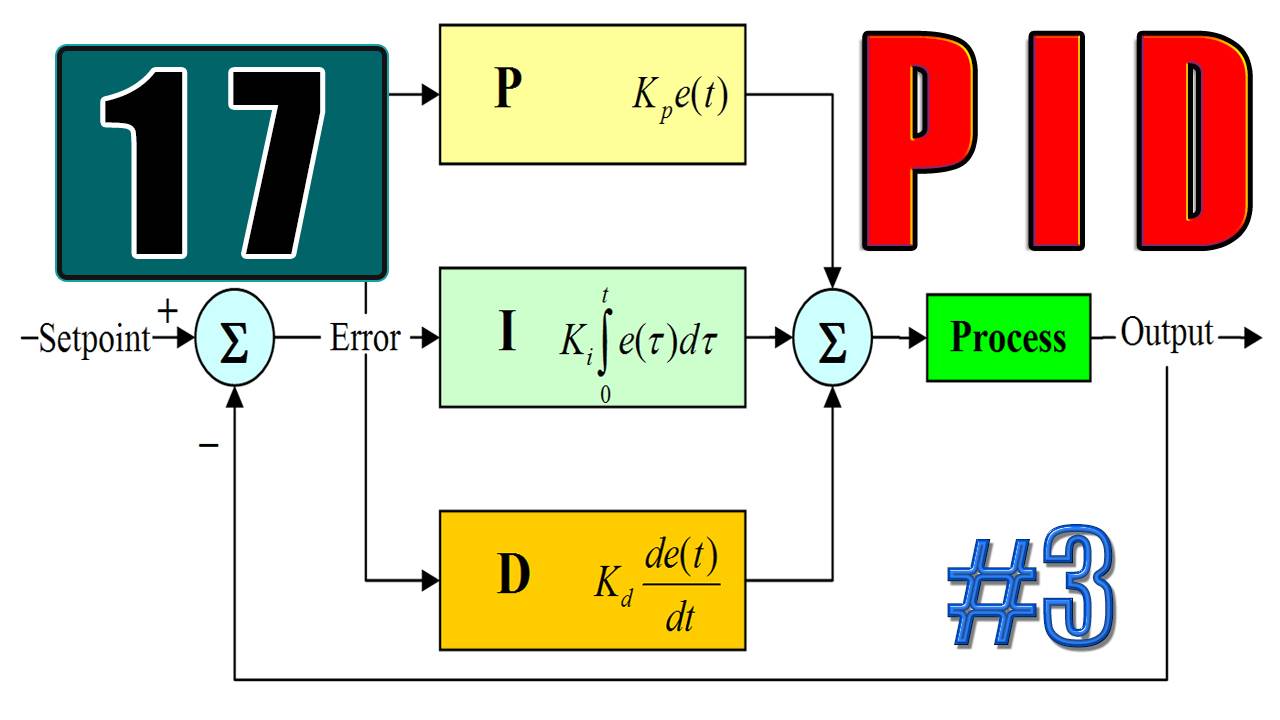
Objectifs Test du correcteur (PI) Test du correcteur PI en cascade avec le correcteur Avance de Phase (PD) Intégration numérique par la méthode de Simpson (Ordre 3, 3 points) Intégration numérique par la méthode de Simpson NC-5-2: (Ordre 7, 5 points) Réduction de l’erreur dynamique (double intégrateur) Ajout des blocs de saturation: Protection contre l’emballement […]