Savoir détecter un objet en fonction de la couleur
Comprendre le principe de détection et classification par couleurs
Savoir générer une action avec Arduino au moment de la détection
Savoir transférer l’état du détecteur à la carte Arduino
Savoir coder les couleurs sur 1 bit ou N bits
Etc.
A quoi sert la détection par couleurs ?
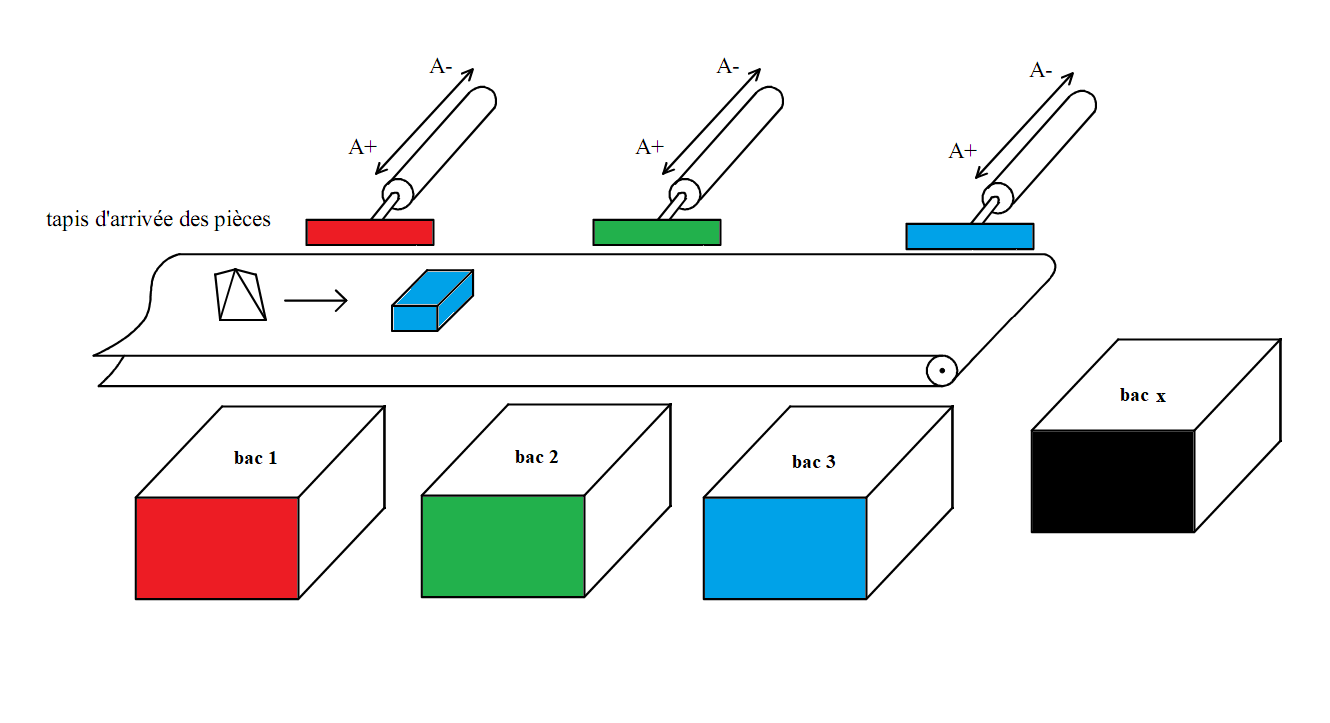
La couleur est une caractéristique importante d’un objet parmi d’autres. Elle peut être utilisée pour classifier des objets distincts (pièces mécaniques, liquide, etc.). On distingue également la longueur, le diamètre, la forme géométrique, etc. On verra dans ce tutoriel le principe de détection en se basant sur la couleur d’un objet avec des exemples. L’exemple ci-dessous indique le tri des boites en fonction de leurs couleurs. Le commande de l’un des trois vérins est effectues en fonction de la couleur des pièces. Le bac x est utilisé lorsqu’aucune vérin n’est actionnée (couleur différente). La commande des trois vérins peut être simulée avec trois LEDs.
Le principe de la méthode utilisée dans ce projet est relativement simple. Il consiste à soustraire la couleur qu’on veut détecter de l’image en niveau de gris issue de l’image originale (image RGB) ! Exemple : On considère une image couleur nommée RGB, et im_gray l’image en niveau de gris obtenue à partir de l’image RGB en utilisant la fonction de conversions rgb2gray (im_gray=rgb2gray(RGB)). On considère im_r l’image résultante obtenue à partir de la composante rouge im_R. L’image im_r est obtenue comme suit :
Im_r=im_R-im_gray
Les pixels les plus clairs de l’image im_r indiquent la présence de la couleur rouge dans l’image. Les pixels sombres montrent l’absence de la cette dernière. L’image ci-dessous montre effectivement dans l’image résultante que la zone du marqueur est plus claire (valeur proche du blanche ou 255) en revanche les autres pixels de l’image on tendance à avoir des valeurs proches de 0 (noirs). Il sera ensuite plus simple d’extraire uniquement la zone la plus claire de l’image et mettre à zéros le reste des pixels grâce au choix d’un seuil « optimal ».
La fonction getObj()
La fonction getObj() prend en entrée une image couleur de type RGB, le seuil de détection et la composante qui intéresse (‘R’, ‘G’ ou ‘B’). Le seuil est une valeur comprise entre 0 et 1. Elle agit sur la sensibilité du détecteur. La fonction retourne ensuite l’état du détection (présence ou absence de la couleur dans l’image) et l’image binaire. Ci-dessous la définition de la fonction. La variable DET indique le nombre des pixels allumés de l’image binaire. Autrement dit, les nombre des pixels ayant la couleur visée. Le nombre des pixels allumés est étroitement liée à la couleur de l’objet ainsi sa taille dans l’image (voir le tuto pour plus de détails).
function [im_out, DET]=getObj(im_inRGB, Seuil, COLOR)
% Params im_inRGB=im_inRGB/255; [M, N, P]=size(im_inRGB); im_out=zeros(M,N); DET=0;
% Image NG NG=rgb2gray(im_inRGB);
% Calcul de l'image résultante if COLOR=='R' R=squeeze(im_inRGB(:,:,1)); im_sub=imsubtract(R,NG); im_out=im_sub > Seuil; nPix=length(find(im_out(:)==1)); DET=nPix; return; end
if COLOR=='G' G=squeeze(im_inRGB(:,:,2)); im_sub=imsubtract(G,NG); im_out=im_sub > Seuil; nPix=length(find(im_out(:)==1)); DET=nPix; return; end
if COLOR=='B' B=squeeze(im_inRGB(:,:,3)); im_sub=imsubtract(B,NG); im_out=im_sub > Seuil; nPix=length(find(im_out(:)==1)); DET=nPix; return; end end
Exemple
L’exemple ci-dessous fait appel à la fonction getObj() pour les trois composantes.
Seuil=0.1; % Seuil de conversion au format binaire