
Objectifs
- Savoir l’importance du capteur à effet Hall
- Savoir utiliser un compteur de vitesse
- Savoir l’utilité du capteur de vitesse
- Savoir les caractéristiques du compteur
- Savoir mesurer la vitesse de rotation d’un moteur
- Savoir mesurer la fréquence d’un signal (deux méthodes)
- Savoir utiliser un tachymètre pour la mesure de la vitesse
- Savoir réduire l’erreur de la mesure
- Savoir mesurer la largeur d’une impulsion
- Etc.
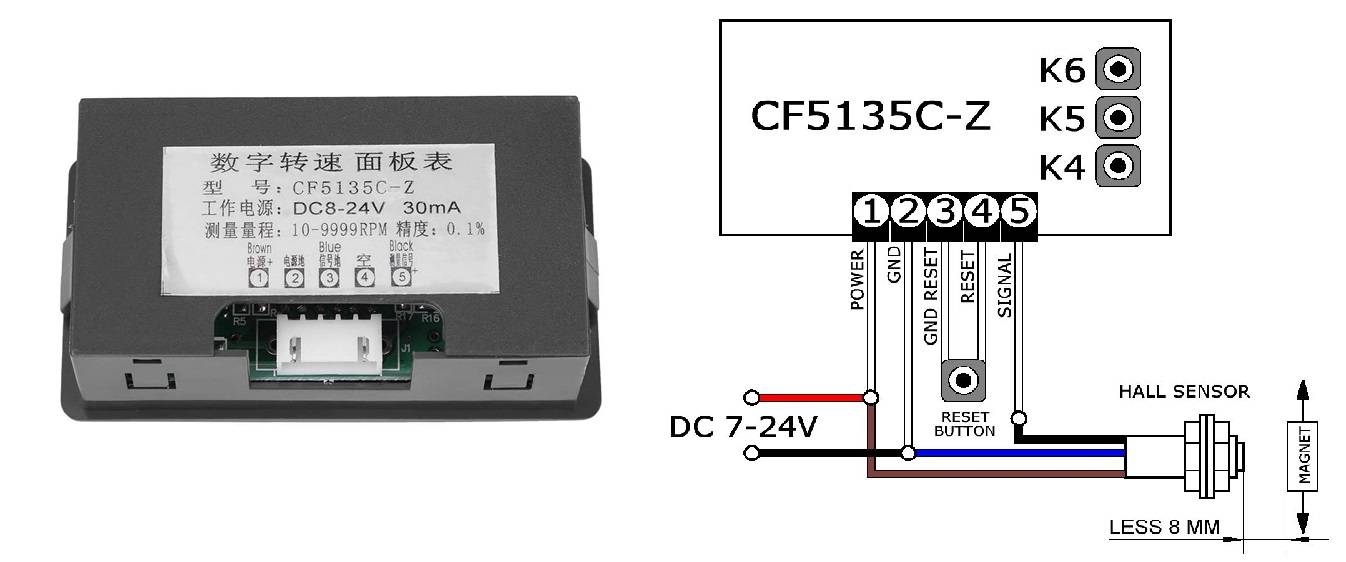
Caractéristiques du compteur de vitesse

Le compteur de vitesse est similaire à un fréquencemètre numérique. Elle permet de mesurer la fréquence d’un signal TOR. Il suffit de multiplier la fréquence par 60 pour en déduire la vitesse en tr/min (RPM). Le module contient un µC STM8S003F3 et un afficheur 4 digits. Ci-dessous les caractéristiques techniques de l’afficheur.
- Modèle : CF5135C-Z
- Microcontrôleur : STM8S003F3
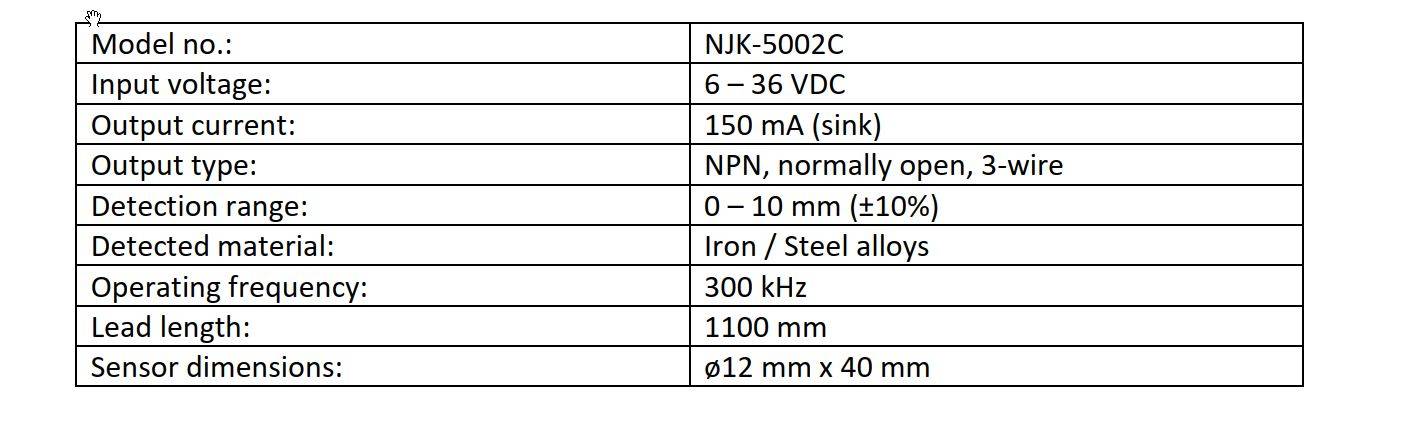
- Capteur de proximité : NJK-5002C
- Type d’affichage : affichage LED
- Couleur de l’écran : Bleu
- Tension de travail : 8-24V DC
- Courant : 30 ~ 200mA
- Plage de mesure : 10-9999 rpm (0.16-166 Hz)
- Précision : 0.1%
- Taux de rafraîchissement de l’écran : >3 fois / s (3 Hz)
- Dimensions de l’installation : 76 x 39mm
- Dimensions : 79 x 32 x 42mm
- Poids net: 108g
Voir le tuto pour un câblage correct (sans incident) de l’afficheur).
Caractéristiques du capteur magnétique

Programme Arduino
Le programme est identique à celui utilisé dans la partie 2 (voir le tuto pour plus de détails techniques).